 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizable task representation learning from human demonstration videos: a geometric approach
Paper and Code
Feb 28, 2022


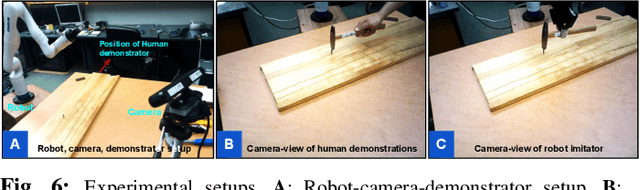
We study the problem of generalizable task learning from human demonstration videos without extra training on the robot or pre-recorded robot motions. Given a set of human demonstration videos showing a task with different objects/tools (categorical objects), we aim to learn a representation of visual observation that generalizes to categorical objects and enables efficient controller design. We propose to introduce a geometric task structure to the representation learning problem that geometrically encodes the task specification from human demonstration videos, and that enables generalization by building task specification correspondence between categorical objects. Specifically, we propose CoVGS-IL, which uses a graph-structured task function to learn task representations under structural constraints. Our method enables task generalization by selecting geometric features from different objects whose inner connection relationships define the same task in geometric constraints. The learned task representation is then transferred to a robot controller using uncalibrated visual servoing (UVS); thus, the need for extra robot training or pre-recorded robot motions is removed.