 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral, Single-shot, Target-less, and Automatic LiDAR-Camera Extrinsic Calibration Toolbox
Paper and Code
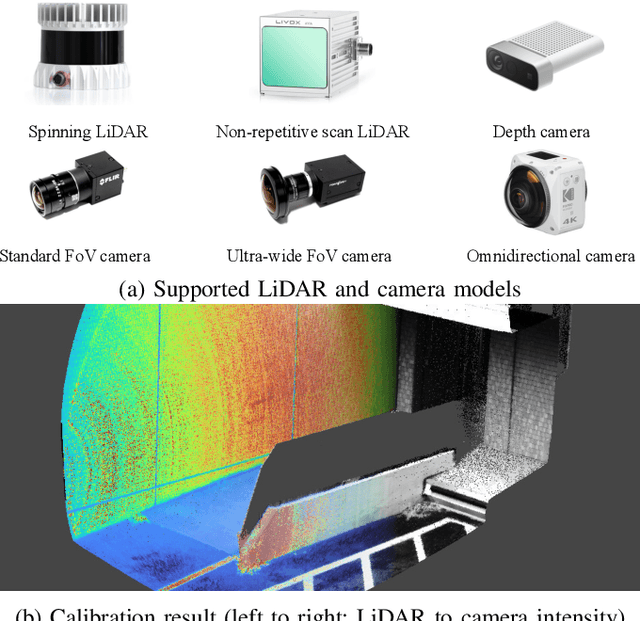



This paper presents an open source LiDAR-camera calibration toolbox that is general to LiDAR and camera projection models, requires only one pairing of LiDAR and camera data without a calibration target, and is fully automatic. For automatic initial guess estimation, we employ the SuperGlue image matching pipeline to find 2D-3D correspondences between LiDAR and camera data and estimate the LiDAR-camera transformation via RANSAC. Given the initial guess, we refine the transformation estimate with direct LiDAR-camera registration based on the normalized information distance, a mutual information-based cross-modal distance metric. For a handy calibration process, we also present several assistance capabilities (e.g., dynamic LiDAR data integration and user interface for making 2D-3D correspondence manually). The experimental results show that the proposed toolbox enables calibration of any combination of spinning and non-repetitive scan LiDARs and pinhole and omnidirectional cameras, and shows better calibration accuracy and robustness than those of the state-of-the-art edge-alignment-based calibration method.