 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Process Self-triggered Policy Search in Weakly Observable Environments
Paper and Code
May 07, 2022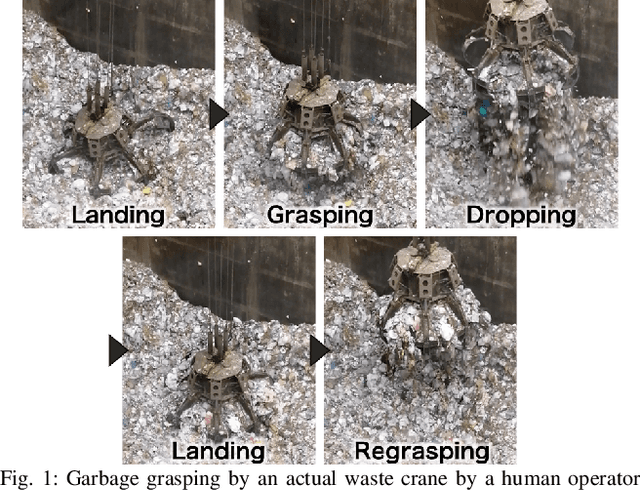
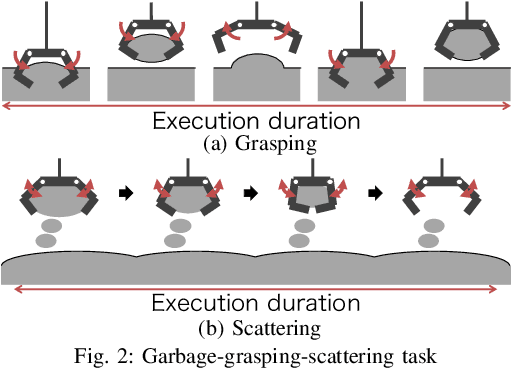
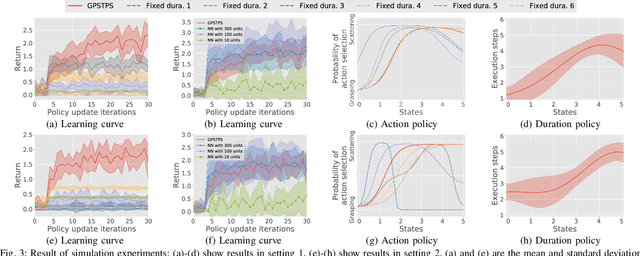

The environments of such large industrial machines as waste cranes in waste incineration plants are often weakly observable, where little information about the environmental state is contained in the observations due to technical difficulty or maintenance cost (e.g., no sensors for observing the state of the garbage to be handled). Based on the findings that skilled operators in such environments choose predetermined control strategies (e.g., grasping and scattering) and their durations based on sensor values, %thereby improving the robustness of their actions, we propose a novel non-parametric policy search algorithm: Gaussian process self-triggered policy search (GPSTPS). GPSTPS has two types of control policies: action and duration. A gating mechanism either maintains the action selected by the action policy for the duration specified by the duration policy or updates the action and duration by passing new observations to the policy; therefore, it is categorized as self-triggered. GPSTPS simultaneously learns both policies by trial and error based on sparse GP priors and variational learning to maximize the return. To verify the performance of our proposed method, we conducted experiments on garbage-grasping-scattering task for a waste crane with weak observations using a simulation and a robotic waste crane system. As experimental results, the proposed method acquired suitable policies to determine the action and duration based on the garbage's characteristics.