 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGatedUniPose: A Novel Approach for Pose Estimation Combining UniRepLKNet and Gated Convolution
Paper and Code
Sep 12, 2024

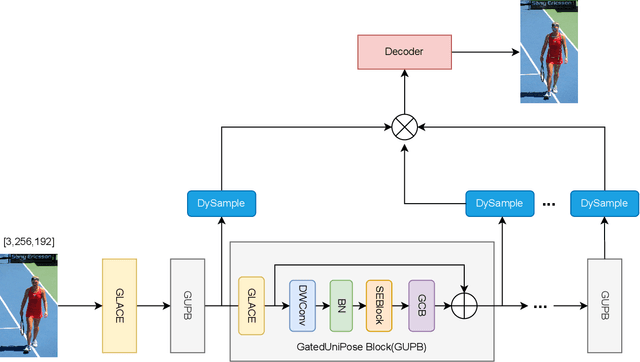
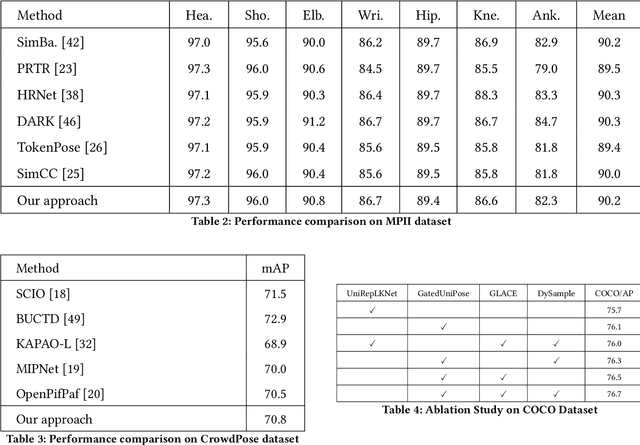
Pose estimation is a crucial task in computer vision, with wide applications in autonomous driving, human motion capture, and virtual reality. However, existing methods still face challenges in achieving high accuracy, particularly in complex scenes. This paper proposes a novel pose estimation method, GatedUniPose, which combines UniRepLKNet and Gated Convolution and introduces the GLACE module for embedding. Additionally, we enhance the feature map concatenation method in the head layer by using DySample upsampling. Compared to existing methods, GatedUniPose excels in handling complex scenes and occlusion challenges. Experimental results on the COCO, MPII, and CrowdPose datasets demonstrate that GatedUniPose achieves significant performance improvements with a relatively small number of parameters, yielding better or comparable results to models with similar or larger parameter sizes.