 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGASP : Geometric Association with Surface Patches
Paper and Code
Nov 15, 2014
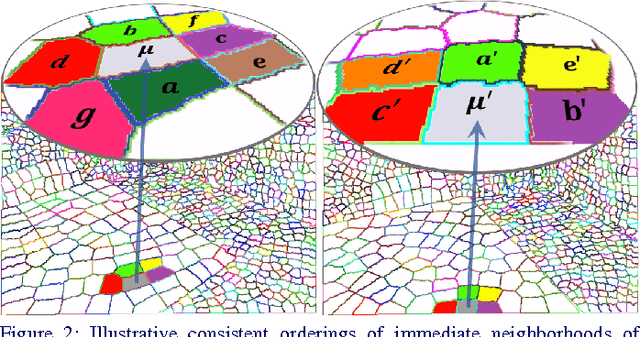
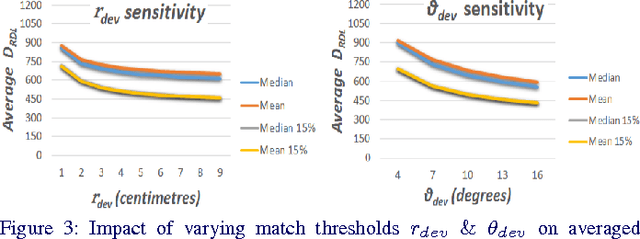
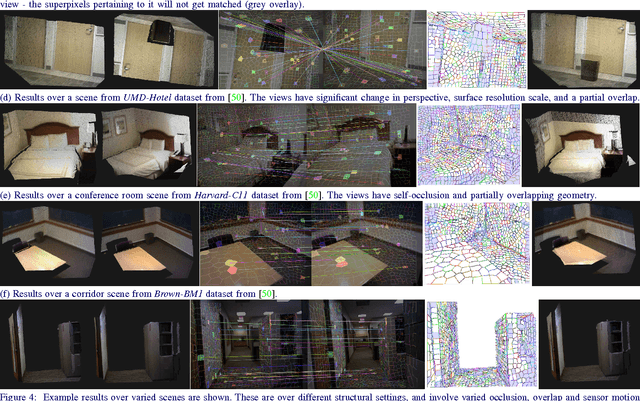
A fundamental challenge to sensory processing tasks in perception and robotics is the problem of obtaining data associations across views. We present a robust solution for ascertaining potentially dense surface patch (superpixel) associations, requiring just range information. Our approach involves decomposition of a view into regularized surface patches. We represent them as sequences expressing geometry invariantly over their superpixel neighborhoods, as uniquely consistent partial orderings. We match these representations through an optimal sequence comparison metric based on the Damerau-Levenshtein distance - enabling robust association with quadratic complexity (in contrast to hitherto employed joint matching formulations which are NP-complete). The approach is able to perform under wide baselines, heavy rotations, partial overlaps, significant occlusions and sensor noise. The technique does not require any priors -- motion or otherwise, and does not make restrictive assumptions on scene structure and sensor movement. It does not require appearance -- is hence more widely applicable than appearance reliant methods, and invulnerable to related ambiguities such as textureless or aliased content. We present promising qualitative and quantitative results under diverse settings, along with comparatives with popular approaches based on range as well as RGB-D data.