Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAN Path Finder: Preliminary results
Paper and Code
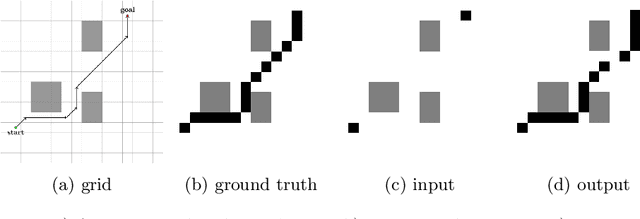
2D path planning in static environment is a well-known problem and one of the common ways to solve it is to 1) represent the environment as a grid and 2) perform a heuristic search for a path on it. At the same time 2D grid resembles much a digital image, thus an appealing idea comes to being -- to treat the problem as an image generation task and to solve it utilizing the recent advances in deep learning. In this work we make an attempt to apply a generative neural network as a path finder and report preliminary results, convincing enough to claim that this direction of research is worth further exploration.
* Camera-ready version of the paper as to appear in KI 2019 proceedings
View paper on