 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAKP: GRU Association and Kalman Prediction for Multiple Object Tracking
Paper and Code
Dec 28, 2020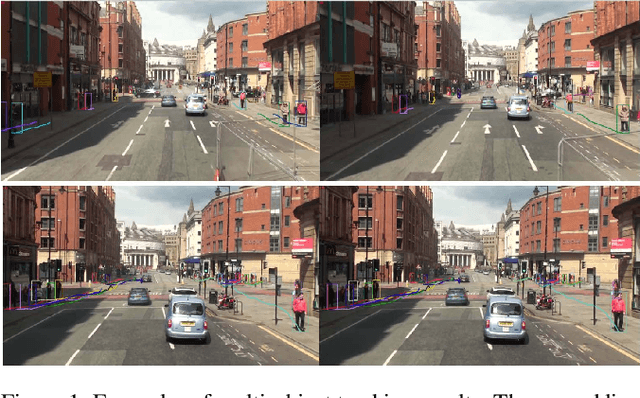

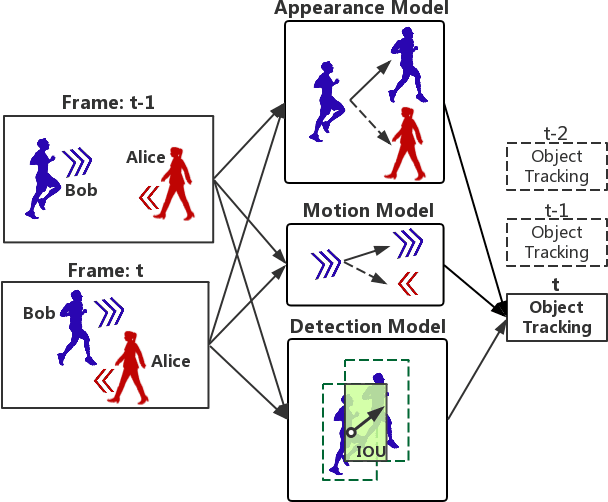

Multiple Object Tracking (MOT) has been a useful yet challenging task in many real-world applications such as video surveillance, intelligent retail, and smart city. The challenge is how to model long-term temporal dependencies in an efficient manner. Some recent works employ Recurrent Neural Networks (RNN) to obtain good performance, which, however, requires a large amount of training data. In this paper, we proposed a novel tracking method that integrates the auto-tuning Kalman method for prediction and the Gated Recurrent Unit (GRU) and achieves a near-optimum with a small amount of training data. Experimental results show that our new algorithm can achieve competitive performance on the challenging MOT benchmark, and faster and more robust than the state-of-the-art RNN-based online MOT algorithms.