 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGait Analysis for A Tilt-rotor: The Dynamic Invertible Gait
Paper and Code
Jan 05, 2022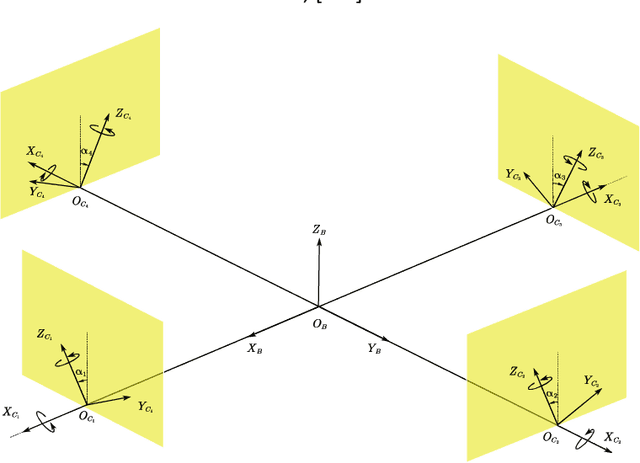
Feedback linearization is a popular control method for controlling the tilt-rotor. Despite the fact that this method brings the opportunities to utilize the over-actuated property of the system, typical results indicate the large change in tilting angles, which is not expected in practical. To solve this problem, we introduce the novel concept UAV gait to restrict the tilting angles. Gait plan problem was initially to solve the control problems for quadruped (four-legged) robots. While transplanting this approach, accompanying with the Feedback Linearization method, to the tilt-rotor may cause the well-known non-invertible problem in the decoupling matrix. In this research, we explore the invertible gait for the tilt-rotor and apply the feedback linearization to stabilize the attitude and the altitude. The result is verified in Simulink, MATLAB.