Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAGrasp: Geometric Algebra Diffusion for Dexterous Grasping
Paper and Code
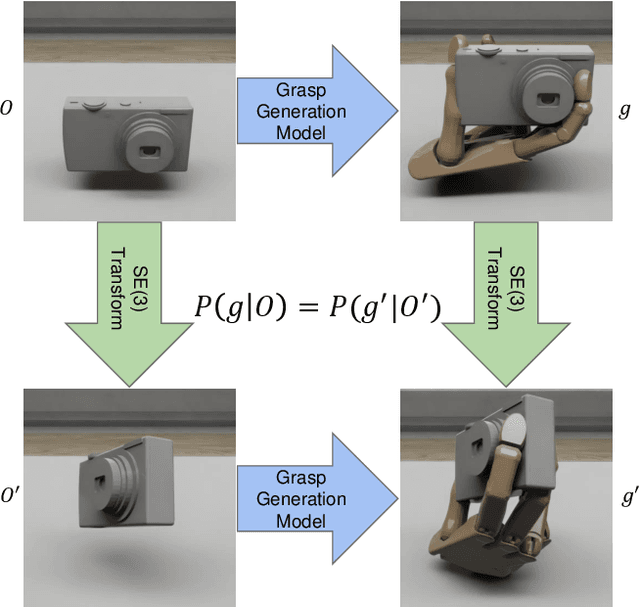
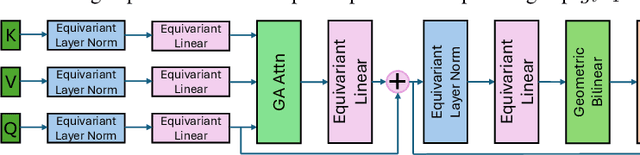

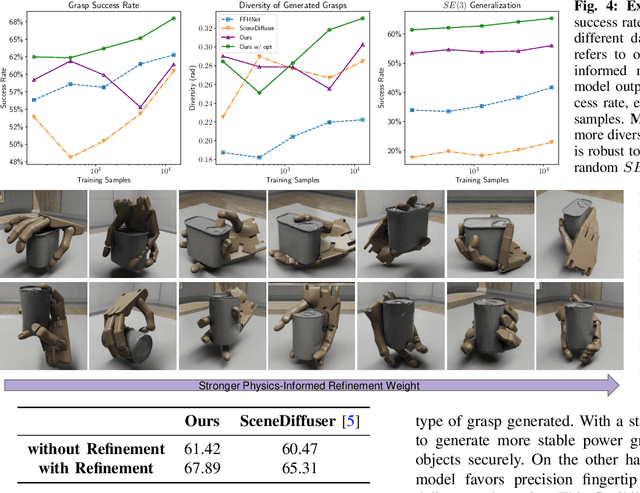
We propose GAGrasp, a novel framework for dexterous grasp generation that leverages geometric algebra representations to enforce equivariance to SE(3) transformations. By encoding the SE(3) symmetry constraint directly into the architecture, our method improves data and parameter efficiency while enabling robust grasp generation across diverse object poses. Additionally, we incorporate a differentiable physics-informed refinement layer, which ensures that generated grasps are physically plausible and stable. Extensive experiments demonstrate the model's superior performance in generalization, stability, and adaptability compared to existing methods. Additional details at https://gagrasp.github.io/
* Accepted at ICRA 2025
View paper on