 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuture Aware Safe Active Learning of Time Varying Systems using Gaussian Processes
Paper and Code
May 17, 2024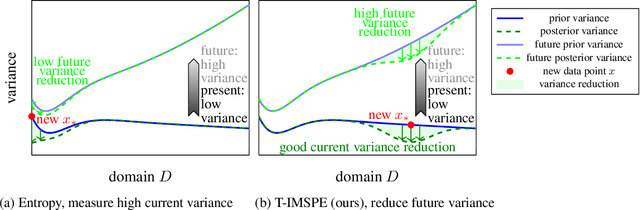
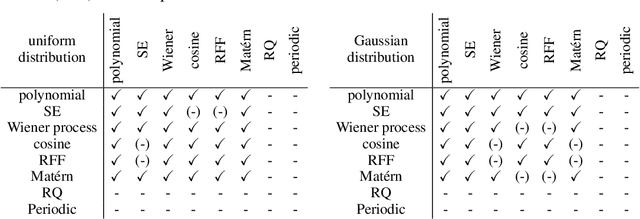
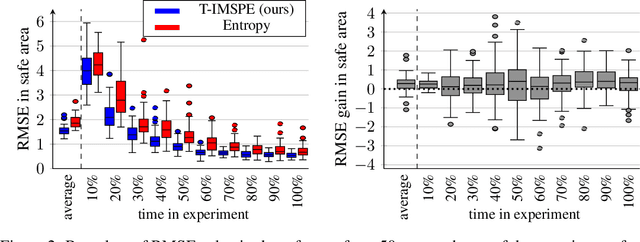
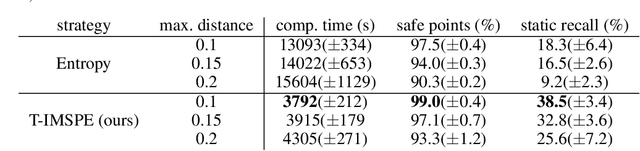
Experimental exploration of high-cost systems with safety constraints, common in engineering applications, is a challenging endeavor. Data-driven models offer a promising solution, but acquiring the requisite data remains expensive and is potentially unsafe. Safe active learning techniques prove essential, enabling the learning of high-quality models with minimal expensive data points and high safety. This paper introduces a safe active learning framework tailored for time-varying systems, addressing drift, seasonal changes, and complexities due to dynamic behavior. The proposed Time-aware Integrated Mean Squared Prediction Error (T-IMSPE) method minimizes posterior variance over current and future states, optimizing information gathering also in the time domain. Empirical results highlight T-IMSPE's advantages in model quality through toy and real-world examples. State of the art Gaussian processes are compatible with T-IMSPE. Our theoretical contributions include a clear delineation which Gaussian process kernels, domains, and weighting measures are suitable for T-IMSPE and even beyond for its non-time aware predecessor IMSPE.