 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Bayesian Recurrent Neural Networks for Safe Reinforcement Learning
Paper and Code
Nov 26, 2019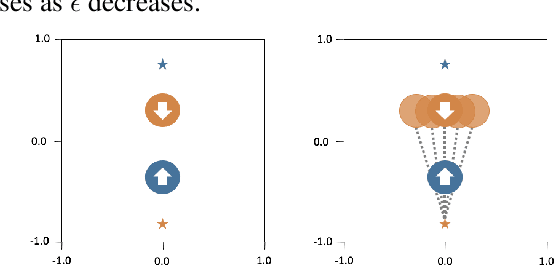


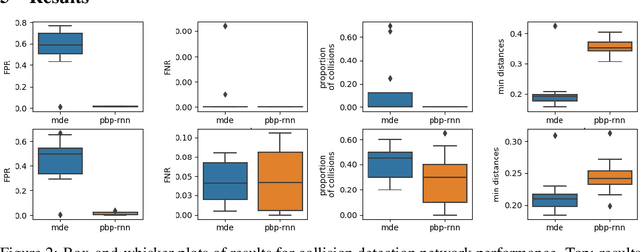
Reinforcement Learning (RL) has demonstrated state-of-the-art results in a number of autonomous system applications, however many of the underlying algorithms rely on black-box predictions. This results in poor explainability of the behaviour of these systems, raising concerns as to their use in safety-critical applications. Recent work has demonstrated that uncertainty-aware models exhibit more cautious behaviours through the incorporation of model uncertainty estimates. In this work, we build on Probabilistic Backpropagation to introduce a fully Bayesian Recurrent Neural Network architecture. We apply this within a Safe RL scenario, and demonstrate that the proposed method significantly outperforms a popular approach for obtaining model uncertainties in collision avoidance tasks. Furthermore, we demonstrate that the proposed approach requires less training and is far more efficient than the current leading method, both in terms of compute resource and memory footprint.