 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Pixels to Buildings: End-to-end Probabilistic Deep Networks for Large-scale Semantic Mapping
Paper and Code
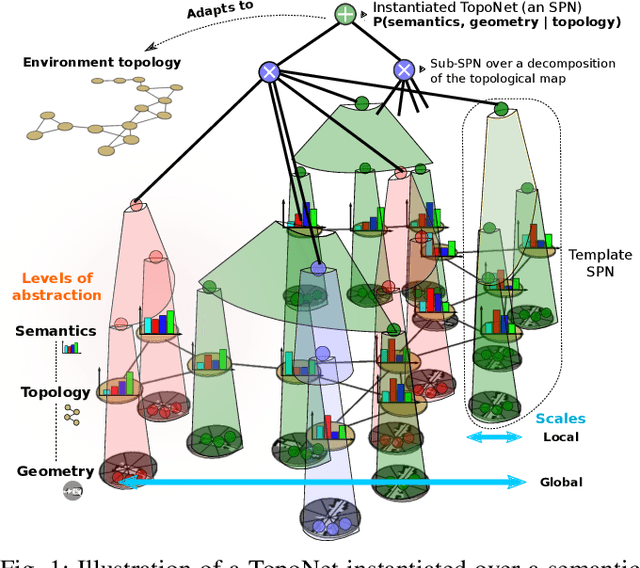

We introduce TopoNets, end-to-end probabilistic deep networks for modeling semantic maps with structure reflecting the topology of large-scale environments. TopoNets build a unified deep network spanning multiple levels of abstraction and spatial scales, from pixels representing geometry of local places to high-level descriptions of semantics of buildings. To this end, TopoNets leverage complex spatial relations expressed in terms of arbitrary, dynamic graphs. We demonstrate how TopoNets can be used to perform end-to-end semantic mapping from partial sensory observations and noisy topological relations discovered by a robot exploring large-scale office spaces. Thanks to their probabilistic nature and generative properties, TopoNets extend the problem of semantic mapping beyond classification. We show that TopoNets successfully perform uncertain reasoning about yet unexplored space and detect novel and incongruent environment configurations unknown to the robot. Our implementation of TopoNets achieves real-time tractable and exact inference, which makes this new class of deep models a promising practical solution to comprehensive spatial understanding for mobile robots.