 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Navigation to Racing: Reward Signal Design for Autonomous Racing
Paper and Code
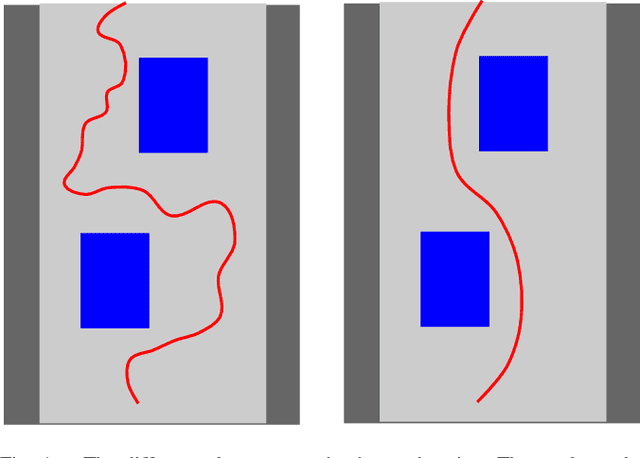
The problem of autonomous navigation is to generate a set of navigation references which when followed move the vehicle from a starting position to and end goal location while avoiding obstacles. Autonomous racing complicates the navigation problem by adding the objective of minimising the time to complete a track. Solutions aiming for a minimum time solution require that the planner is concerned with the optimality of the trajectory according to the vehicle dynamics. Neural networks, trained from experience with reinforcement learning, have shown to be effective local planners which generate navigation references to follow a global plan and avoid obstacles. We address the problem designing a reward signal which can be used to train neural network-based local planners to race in a time-efficient manner and avoid obstacles. The general challenge of reward signal design is to represent a desired behavior in an equation that can be calculated at each time step. The specific challenge of designing a reward signal for autonomous racing is to encode obstacle-free, time optimal racing trajectories in a clear signal We propose several methods of encoding ideal racing behavior based using a combination of the position and velocity of the vehicle and the actions taken by the network. The reward function candidates are expressed as equations and evaluated in the context of F1/10th autonomous racing. The results show that the best reward signal rewards velocity along, and punishes the lateral deviation from a precalculated, optimal reference trajectory.