 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Cooking Recipes to Robot Task Trees -- Improving Planning Correctness and Task Efficiency by Leveraging LLMs with a Knowledge Network
Paper and Code
Sep 17, 2023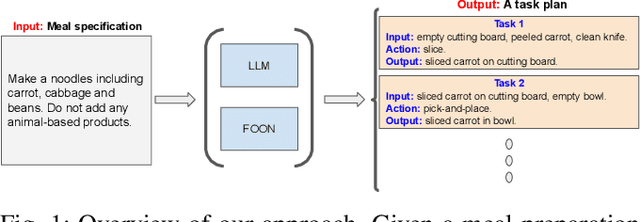

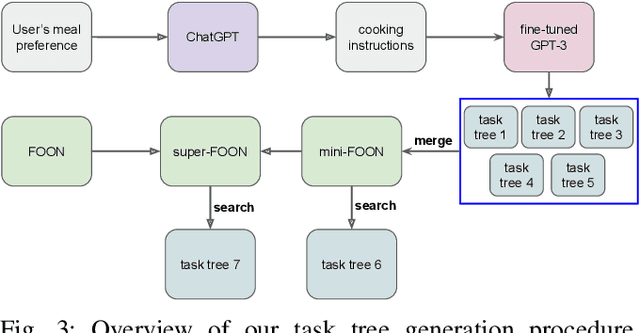

Task planning for robotic cooking involves generating a sequence of actions for a robot to prepare a meal successfully. This paper introduces a novel task tree generation pipeline producing correct planning and efficient execution for cooking tasks. Our method first uses a large language model (LLM) to retrieve recipe instructions and then utilizes a fine-tuned GPT-3 to convert them into a task tree, capturing sequential and parallel dependencies among subtasks. The pipeline then mitigates the uncertainty and unreliable features of LLM outputs using task tree retrieval. We combine multiple LLM task tree outputs into a graph and perform a task tree retrieval to avoid questionable nodes and high-cost nodes to improve planning correctness and improve execution efficiency. Our evaluation results show its superior performance compared to previous works in task planning accuracy and efficiency.