 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForced Variational Integrator Networks for Prediction and Control of Mechanical Systems
Paper and Code
Jun 05, 2021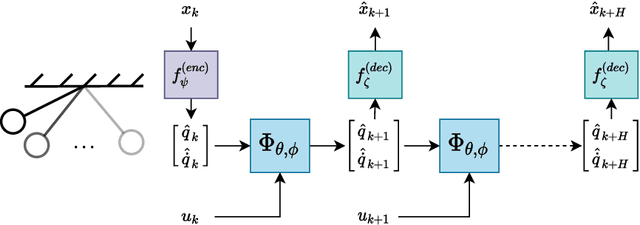

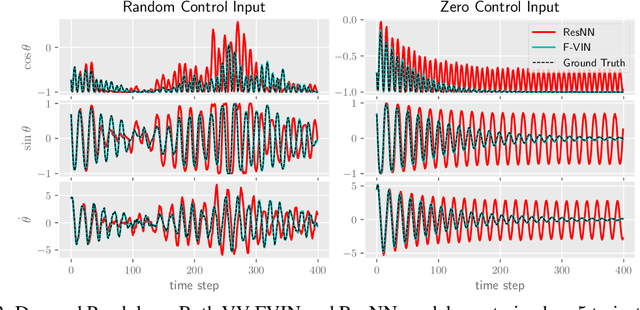
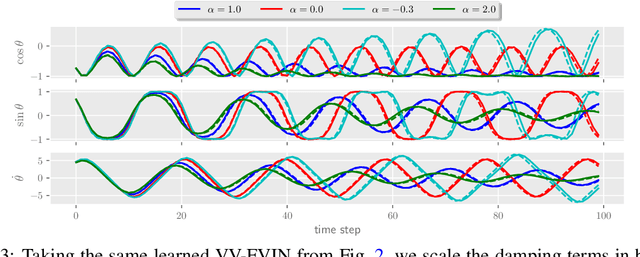
As deep learning becomes more prevalent for prediction and control of real physical systems, it is important that these overparameterized models are consistent with physically plausible dynamics. This elicits a problem with how much inductive bias to impose on the model through known physical parameters and principles to reduce complexity of the learning problem to give us more reliable predictions. Recent work employs discrete variational integrators parameterized as a neural network architecture to learn conservative Lagrangian systems. The learned model captures and enforces global energy preserving properties of the system from very few trajectories. However, most real systems are inherently non-conservative and, in practice, we would also like to apply actuation. In this paper we extend this paradigm to account for general forcing (e.g. control input and damping) via discrete d'Alembert's principle which may ultimately be used for control applications. We show that this forced variational integrator networks (FVIN) architecture allows us to accurately account for energy dissipation and external forcing while still capturing the true underlying energy-based passive dynamics. We show that in application this can result in highly-data efficient model-based control and can predict on real non-conservative systems.