 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFooling the Eyes of Autonomous Vehicles: Robust Physical Adversarial Examples Against Traffic Sign Recognition Systems
Paper and Code
Jan 17, 2022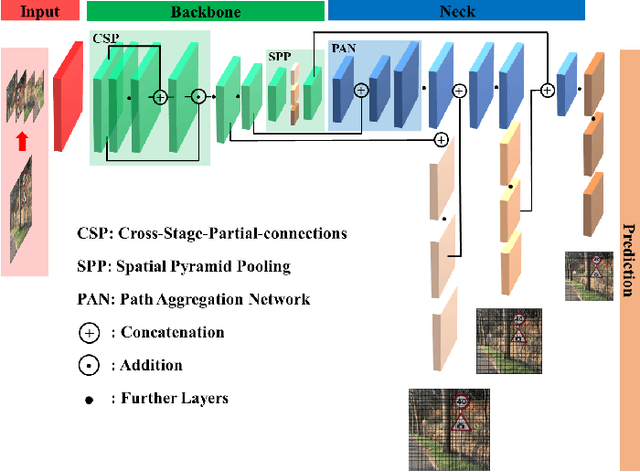

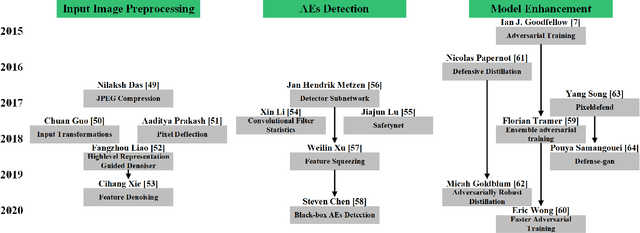
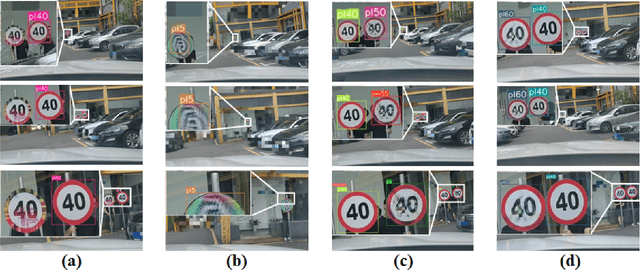
Adversarial Examples (AEs) can deceive Deep Neural Networks (DNNs) and have received a lot of attention recently. However, majority of the research on AEs is in the digital domain and the adversarial patches are static, which is very different from many real-world DNN applications such as Traffic Sign Recognition (TSR) systems in autonomous vehicles. In TSR systems, object detectors use DNNs to process streaming video in real time. From the view of object detectors, the traffic sign`s position and quality of the video are continuously changing, rendering the digital AEs ineffective in the physical world. In this paper, we propose a systematic pipeline to generate robust physical AEs against real-world object detectors. Robustness is achieved in three ways. First, we simulate the in-vehicle cameras by extending the distribution of image transformations with the blur transformation and the resolution transformation. Second, we design the single and multiple bounding boxes filters to improve the efficiency of the perturbation training. Third, we consider four representative attack vectors, namely Hiding Attack, Appearance Attack, Non-Target Attack and Target Attack. We perform a comprehensive set of experiments under a variety of environmental conditions, and considering illuminations in sunny and cloudy weather as well as at night. The experimental results show that the physical AEs generated from our pipeline are effective and robust when attacking the YOLO v5 based TSR system. The attacks have good transferability and can deceive other state-of-the-art object detectors. We launched HA and NTA on a brand-new 2021 model vehicle. Both attacks are successful in fooling the TSR system, which could be a life-threatening case for autonomous vehicles. Finally, we discuss three defense mechanisms based on image preprocessing, AEs detection, and model enhancing.