 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFog Robotics: A Summary, Challenges and Future Scope
Paper and Code
Aug 14, 2019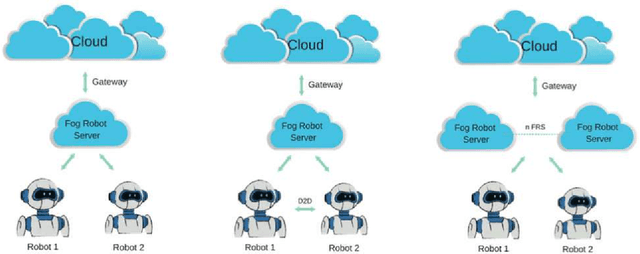

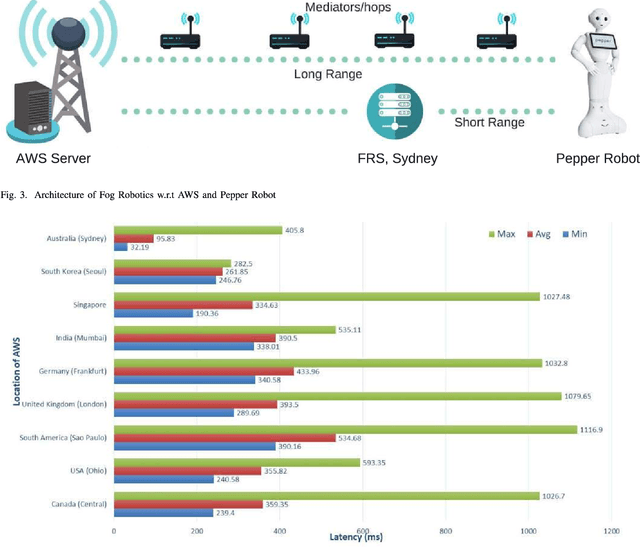
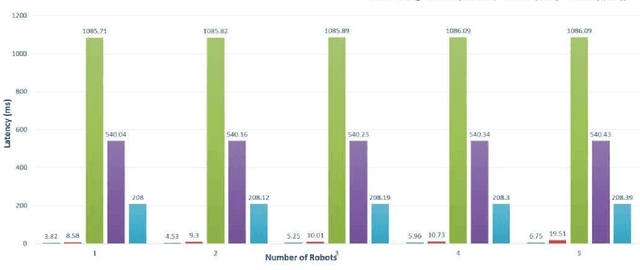
Human-robot interaction plays a crucial role to make robots closer to humans. Usually, robots are limited by their own capabilities. Therefore, they utilise Cloud Robotics to enhance their dexterity. Its ability includes the sharing of information such as maps, images and the processing power. This whole process involves distributing data which intend to rise enormously. New issues can arise such as bandwidth, network congestion at backhaul and fronthaul systems resulting in high latency. Thus, it can make an impact on seamless connectivity between the robots, users and the cloud. Also, a robot may not accomplish its goal successfully within a stipulated time. As a consequence, Cloud Robotics cannot be in a position to handle the traffic imposed by robots. On the contrary, impending Fog Robotics can act as a solution by solving major problems of Cloud Robotics. Therefore to check its feasibility, we discuss the need and architectures of Fog Robotics in this paper. To evaluate the architectures, we used a realistic scenario of Fog Robotics by comparing them with Cloud Robotics. Next, latency is chosen as the primary factor for validating the effectiveness of the system. Besides, we utilised real-time latency using Pepper robot, Fog robot server and the Cloud server. Experimental results show that Fog Robotics reduces latency significantly compared to Cloud Robotics. Moreover, advantages, challenges and future scope of the Fog Robotics system is further discussed.