 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlightBench: A Comprehensive Benchmark of Spatial Planning Methods for Quadrotors
Paper and Code

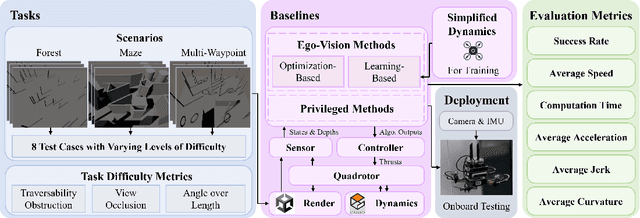


Spatial planning in cluttered environments is crucial for mobile systems, particularly agile quadrotors. Existing methods, both optimization-based and learning-based, often focus only on success rates in specific environments and lack a unified platform with tasks of varying difficulty. To address this, we introduce FlightBench, the first comprehensive open-source benchmark for 3D spatial planning on quadrotors, comparing classical optimization-based methods with emerging learning-based approaches. We also develop a suite of task difficulty metrics and evaluation metrics to quantify the characteristics of tasks and the performance of planning algorithms. Extensive experiments demonstrate the significant advantages of learning-based methods for high-speed flight and real-time planning, while highlighting the need for improvements in complex conditions, such as navigating large corners or dealing with view occlusion. We also conduct analytical experiments to justify the effectiveness of our proposed metrics. Additionally, we show that latency randomization effectively enhances performance in real-world deployments. The source code is available at \url{https://github.com/thu-uav/FlightBench}.