 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible-Joint Manipulator Trajectory Tracking with Learned Two-Stage Model employing One-Step Future Prediction
Paper and Code

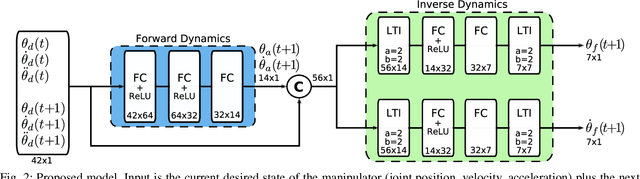

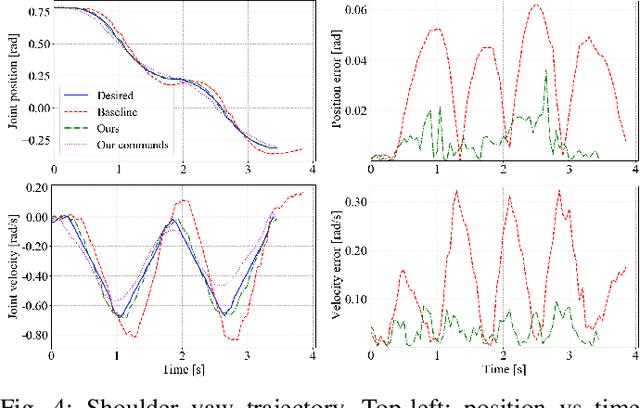
Flexible-joint manipulators are frequently used for increased safety during human-robot collaboration and shared workspace tasks. However, joint flexibility significantly reduces the accuracy of motion, especially at high velocities and with inexpensive actuators. In this paper, we present a learning-based approach to identify the unknown dynamics of a flexible-joint manipulator and improve the trajectory tracking at high velocities. We propose a two-stage model which is composed of a one-step forward dynamics future predictor and an inverse dynamics estimator. The second part is based on linear time-invariant dynamical operators to approximate the feed-forward joint position and velocity commands. We train the model end-to-end on real-world data and evaluate it on the Baxter robot. Our experiments indicate that augmenting the input with one-step future state prediction improves the performance, compared to the same model without prediction. We compare joint position, joint velocity and end-effector position tracking accuracy against the classical baseline controller and several simpler models.