 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastron: An Online Learning-Based Model and Active Learning Strategy for Proxy Collision Detection
Paper and Code
Sep 07, 2017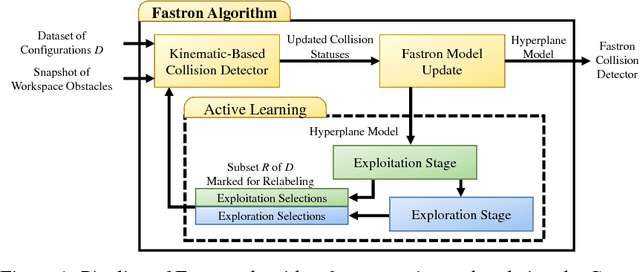
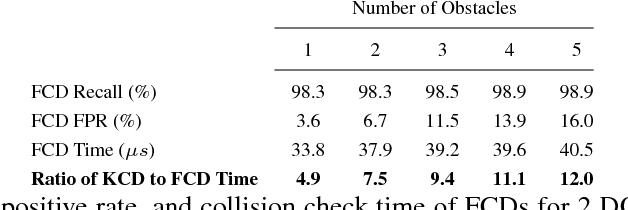
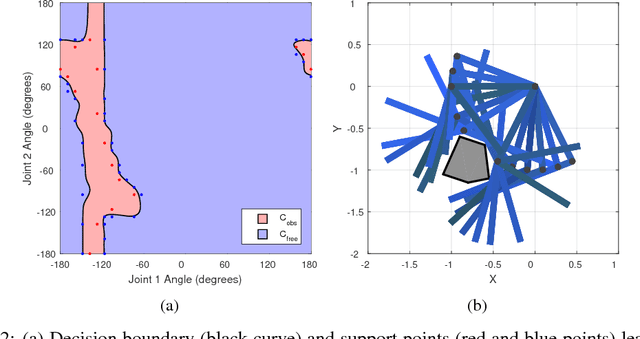
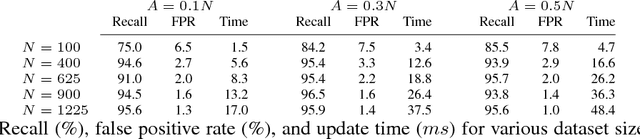
We introduce the Fastron, a configuration space (C-space) model to be used as a proxy to kinematic-based collision detection. The Fastron allows iterative updates to account for a changing environment through a combination of a novel formulation of the kernel perceptron learning algorithm and an active learning strategy. Our simulations on a 7 degree-of-freedom arm indicate that proxy collision checks may be performed at least 2 times faster than an efficient polyhedral collision checker and at least 8 times faster than an efficient high-precision collision checker. The Fastron model provides conservative collision status predictions by padding C-space obstacles, and proxy collision checking time does not scale poorly as the number of workspace obstacles increases. All results were achieved without GPU acceleration or parallel computing.