 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Convergence for Object Detection by Learning how to Combine Error Functions
Paper and Code
Aug 13, 2018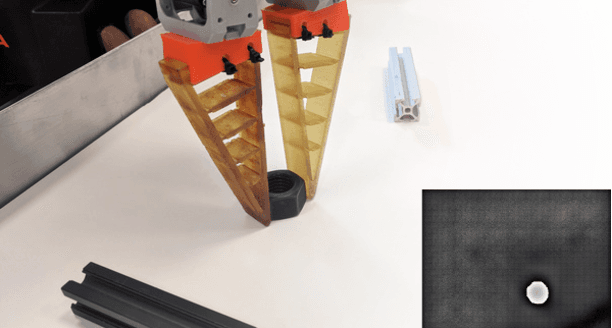
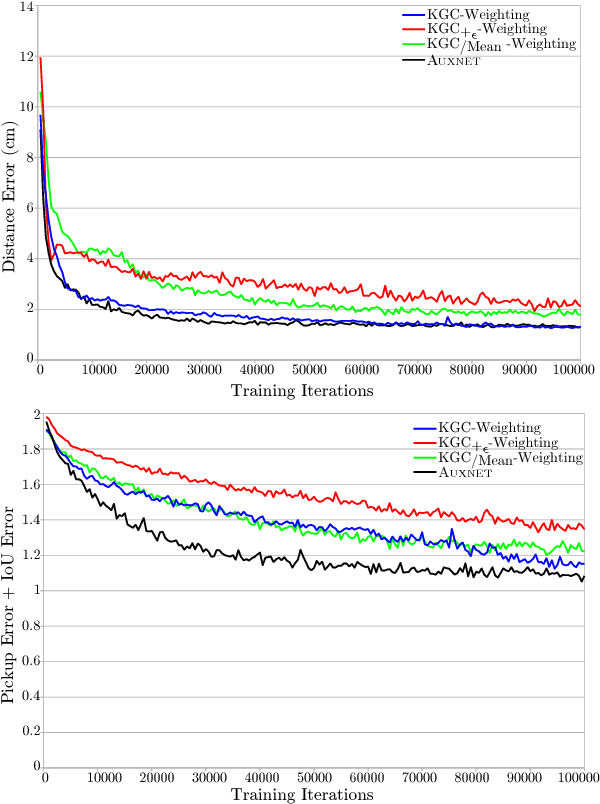
In this paper, we introduce an innovative method to improve the convergence speed and accuracy of object detection neural networks. Our approach, CONVERGE-FAST-AUXNET, is based on employing multiple, dependent loss metrics and weighting them optimally using an on-line trained auxiliary network. Experiments are performed in the well-known RoboCup@Work challenge environment. A fully convolutional segmentation network is trained on detecting objects' pickup points. We empirically obtain an approximate measure for the rate of success of a robotic pickup operation based on the accuracy of the object detection network. Our experiments show that adding an optimally weighted Euclidean distance loss to a network trained on the commonly used Intersection over Union (IoU) metric reduces the convergence time by 42.48%. The estimated pickup rate is improved by 39.90%. Compared to state-of-the-art task weighting methods, the improvement is 24.5% in convergence, and 15.8% on the estimated pickup rate.