 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Robust Certifiable Estimation of the Relative Pose Between Two Calibrated Cameras
Paper and Code
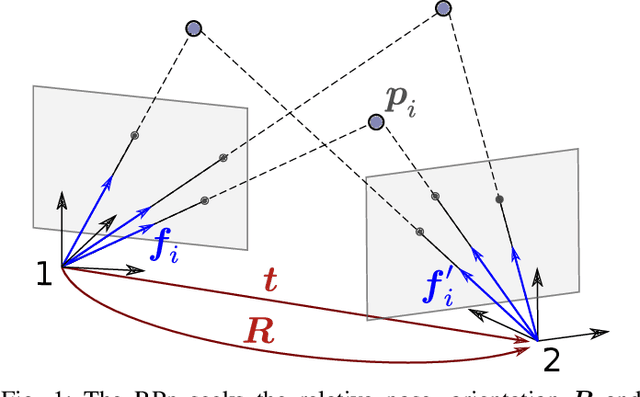
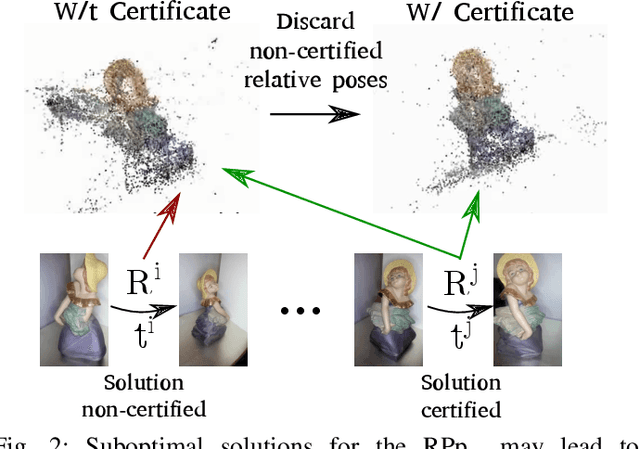
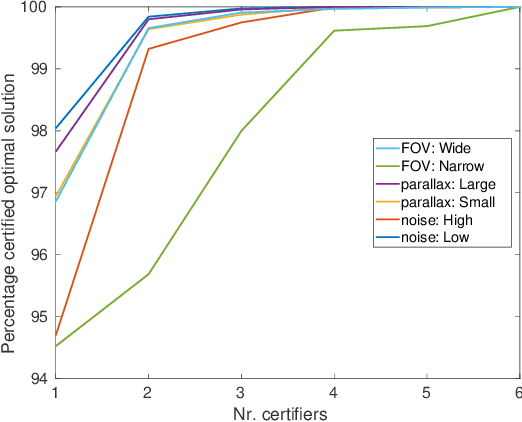
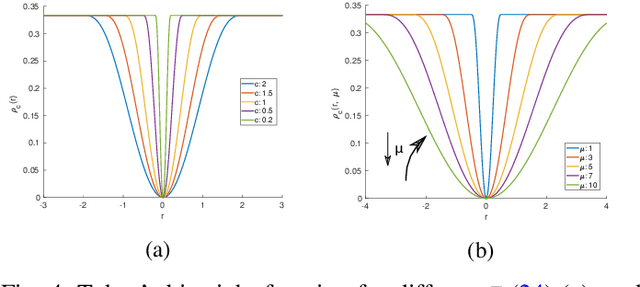
The Relative Pose problem (RPp) for cameras aims to estimate the relative orientation and translation (pose) given a set of pair-wise feature correspondences between two central and calibrated cameras. The RPp is stated as an optimization problem where the squared, normalized epipolar error is minimized over the set of normalized essential matrices. In this work, we contribute an efficient and complete algorithm based on results from duality theory that is able to certify whether the solution to a RPp instance is the global optimum. Specifically, we present a family of certifiers that is shown to increase the ratio of detected optimal solutions. This set of certifiers is incorporated into an efficient essential matrix estimation pipeline that, given any initial guess for the RPp, refines it iteratively on the product space of 3D rotations and 2-sphere and thereupon, certifies the optimality of the solution. We integrate our fast certifiable pipeline into a robust framework that combines Graduated Non-convexity and the Black-Rangarajan duality between robust functions and line processes. This combination has been shown in the literature to outperform the robustness to outliers provided by approaches based on RANSAC. We proved through extensive experiments on synthetic and real data that the proposed framework provides a fast and robust relative pose estimation. We compare our proposal against the state-of-the-art methods on both accuracy and computational cost, and show that our estimations improve the output of the gold-standard approach for the RPp, the 2-view Bundle-Adjustment. We make the code publicly available \url{https://github.com/mergarsal/FastCertRelPose.git}.