 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFailure Probability Estimation for Black-Box Autonomous Systems using State-Dependent Importance Sampling Proposals
Paper and Code
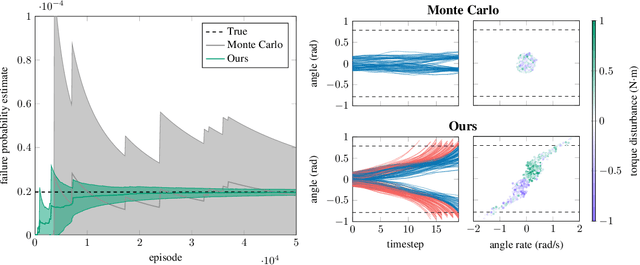
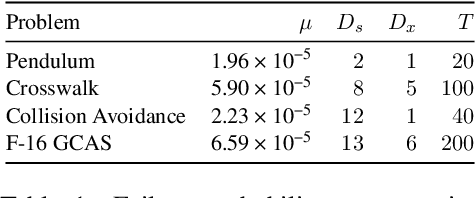
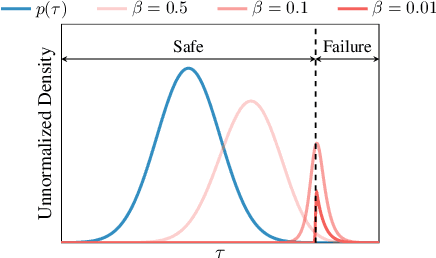
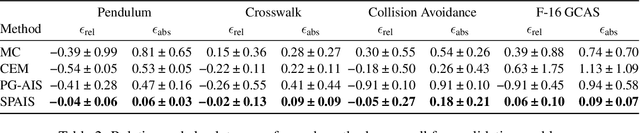
Estimating the probability of failure is a critical step in developing safety-critical autonomous systems. Direct estimation methods such as Monte Carlo sampling are often impractical due to the rarity of failures in these systems. Existing importance sampling approaches do not scale to sequential decision-making systems with large state spaces and long horizons. We propose an adaptive importance sampling algorithm to address these limitations. Our method minimizes the forward Kullback-Leibler divergence between a state-dependent proposal distribution and a relaxed form of the optimal importance sampling distribution. Our method uses Markov score ascent methods to estimate this objective. We evaluate our approach on four sequential systems and show that it provides more accurate failure probability estimates than baseline Monte Carlo and importance sampling techniques. This work is open sourced.