Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtrinsic camera calibration method and its performance evaluation
Paper and Code
Sep 28, 2018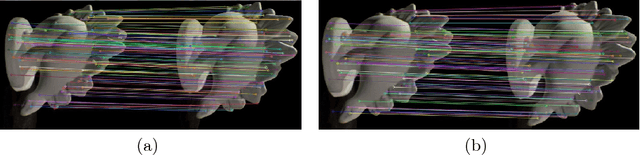
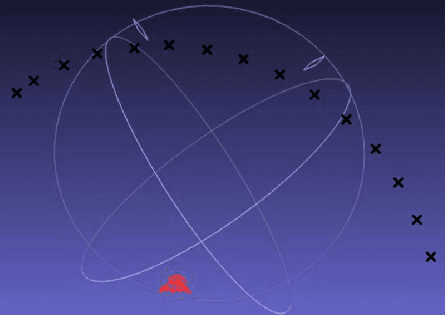
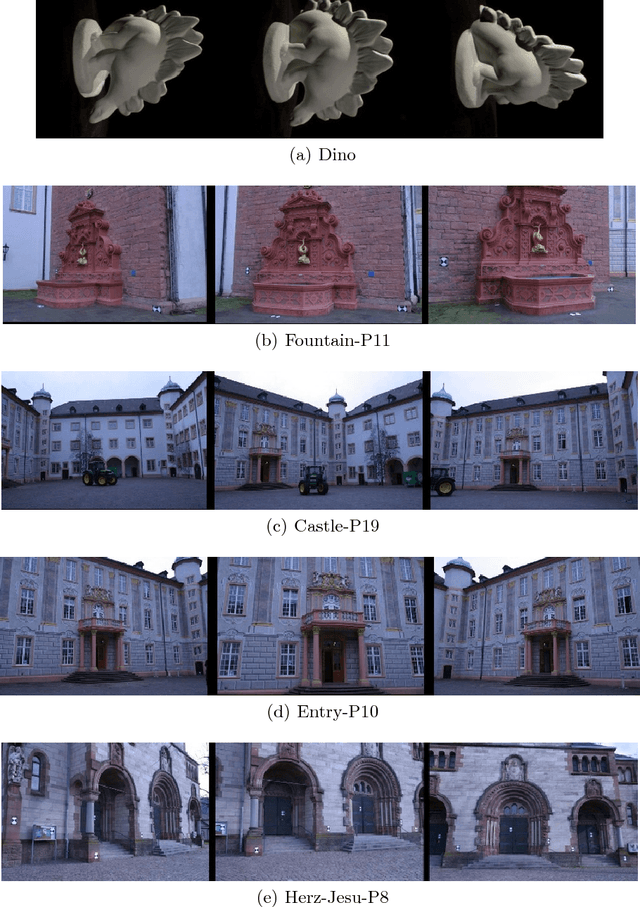
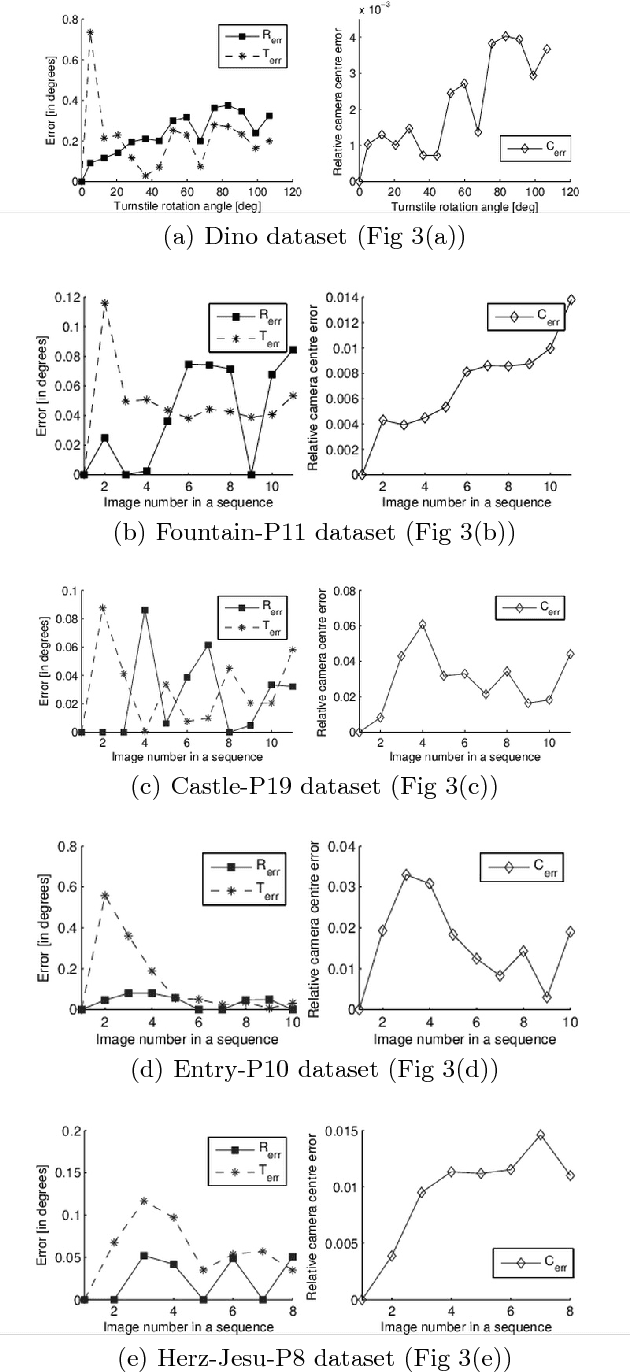
This paper presents a method for extrinsic camera calibration (estimation of camera rotation and translation matrices) from a sequence of images. It is assumed camera intrinsic matrix and distortion coefficients are known and fixed during the entire sequence. %This allows to decrease a number of pairs of corresponding keypoints between images needed to estimate epipolar geometry compared to uncalibrated case. Performance of the presented method is evaluated on a number of multi-view stereo test datasets. Presented algorithm can be used as a first stage in a dense stereo reconstruction system.
* arXiv admin note: text overlap with arXiv:1809.11066
View paper on