Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtrinsic Calibration of LiDAR, IMU and Camera
Paper and Code
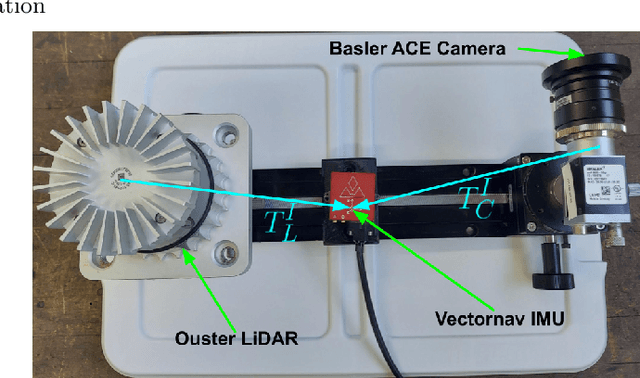
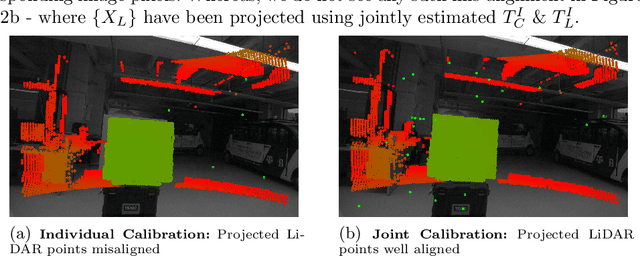
In this work we present a novel method to jointly calibrate a sensor suite consisting a 3D-LiDAR, Inertial Measurement Unit (IMU) and Camera under an Extended Kalman Filter (EKF) framework. We exploit pairwise constraints between the 3 sensor pairs to perform EKF update and experimentally demonstrate the superior performance obtained with joint calibration as against individual sensor pair calibration.
* Workshop on Challenges in Sensor Calibration for Robotics
Applications at the 17th INTERNATIONAL CONFERENCE ON INTELLIGENT AUTONOMOUS
SYSTEMS (IAS-17), ZAGREB, CROATIA
View paper on