 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Driving-aware Salient Object Detection via Knowledge Transfer
Paper and Code
May 18, 2021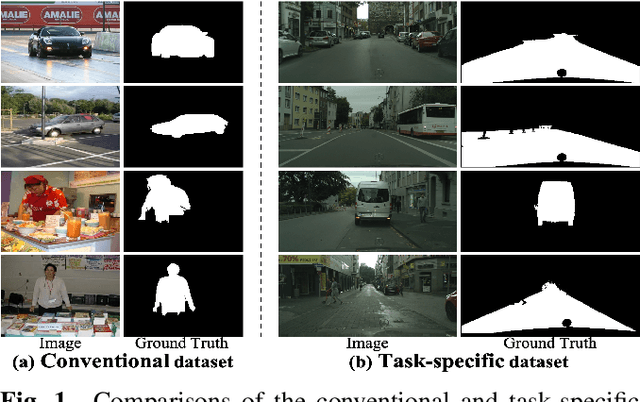
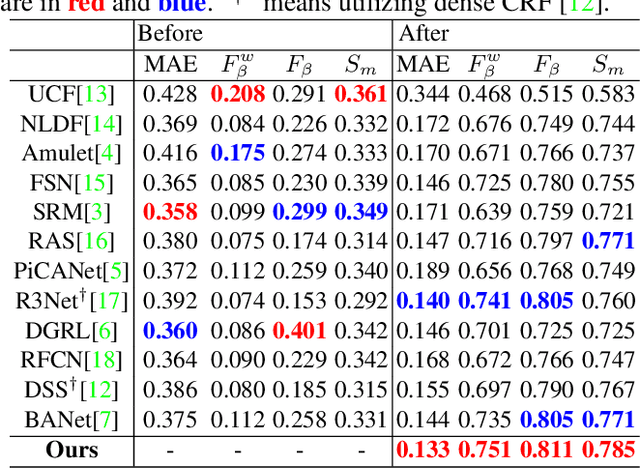
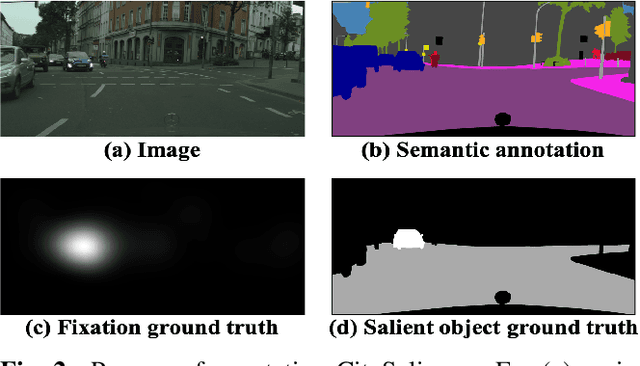
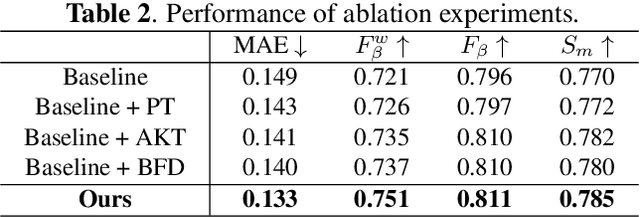
Recently, general salient object detection (SOD) has made great progress with the rapid development of deep neural networks. However, task-aware SOD has hardly been studied due to the lack of task-specific datasets. In this paper, we construct a driving task-oriented dataset where pixel-level masks of salient objects have been annotated. Comparing with general SOD datasets, we find that the cross-domain knowledge difference and task-specific scene gap are two main challenges to focus the salient objects when driving. Inspired by these findings, we proposed a baseline model for the driving task-aware SOD via a knowledge transfer convolutional neural network. In this network, we construct an attentionbased knowledge transfer module to make up the knowledge difference. In addition, an efficient boundary-aware feature decoding module is introduced to perform fine feature decoding for objects in the complex task-specific scenes. The whole network integrates the knowledge transfer and feature decoding modules in a progressive manner. Experiments show that the proposed dataset is very challenging, and the proposed method outperforms 12 state-of-the-art methods on the dataset, which facilitates the development of task-aware SOD.