 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Semantic Epsilon Greedy Exploration Strategy in Multi-Agent Reinforcement Learning
Paper and Code
Jan 27, 2022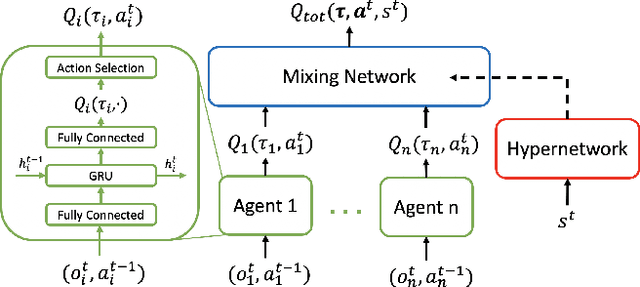

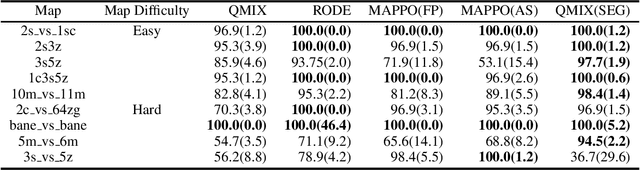
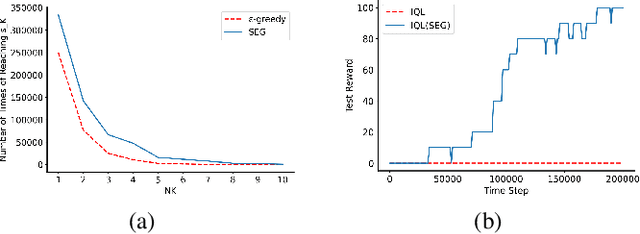
Multi-agent reinforcement learning (MARL) can model many real world applications. However, many MARL approaches rely on epsilon greedy for exploration, which may discourage visiting advantageous states in hard scenarios. In this paper, we propose a new approach QMIX(SEG) for tackling MARL. It makes use of the value function factorization method QMIX to train per-agent policies and a novel Semantic Epsilon Greedy (SEG) exploration strategy. SEG is a simple extension to the conventional epsilon greedy exploration strategy, yet it is experimentally shown to greatly improve the performance of MARL. We first cluster actions into groups of actions with similar effects and then use the groups in a bi-level epsilon greedy exploration hierarchy for action selection. We argue that SEG facilitates semantic exploration by exploring in the space of groups of actions, which have richer semantic meanings than atomic actions. Experiments show that QMIX(SEG) largely outperforms QMIX and leads to strong performance competitive with current state-of-the-art MARL approaches on the StarCraft Multi-Agent Challenge (SMAC) benchmark.