 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting map information for self-supervised learning in motion forecasting
Paper and Code
Oct 10, 2022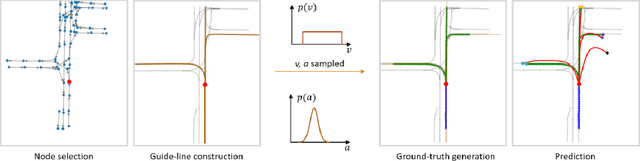
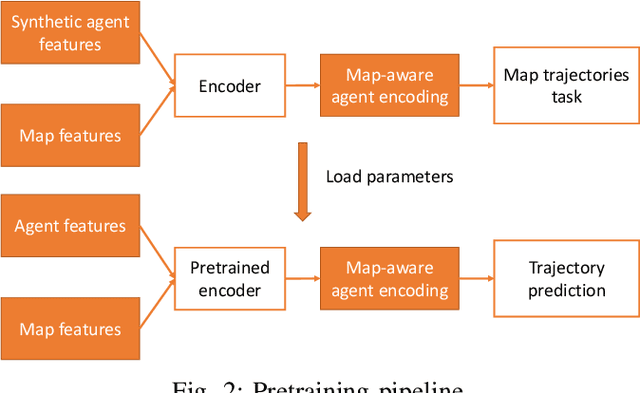
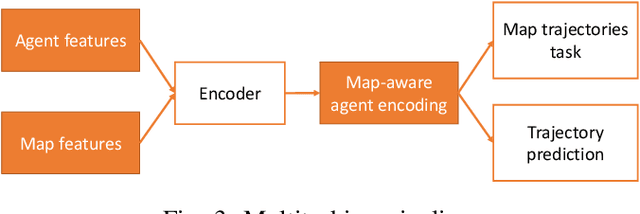
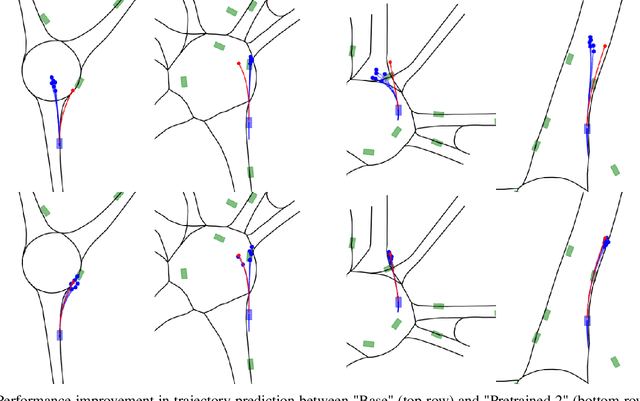
Inspired by recent developments regarding the application of self-supervised learning (SSL), we devise an auxiliary task for trajectory prediction that takes advantage of map-only information such as graph connectivity with the intent of improving map comprehension and generalization. We apply this auxiliary task through two frameworks - multitasking and pretraining. In either framework we observe significant improvement of our baseline in metrics such as $\mathrm{minFDE}_6$ (as much as 20.3%) and $\mathrm{MissRate}_6$ (as much as 33.3%), as well as a richer comprehension of map features demonstrated by different training configurations. The results obtained were consistent in all three data sets used for experiments: Argoverse, Interaction and NuScenes. We also submit our new pretrained model's results to the Interaction challenge and achieve $\textit{1st}$ place with respect to $\mathrm{minFDE}_6$ and $\mathrm{minADE}_6$.