 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Heterogeneous Robotic Systems in Cooperative Missions
Paper and Code
Sep 03, 2015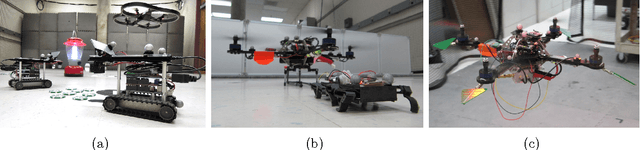
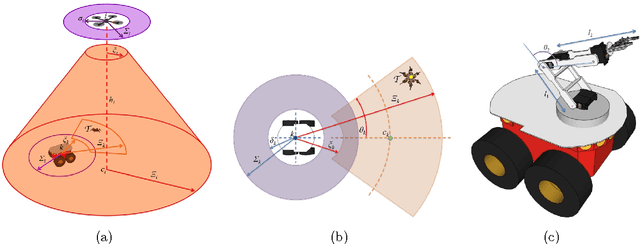
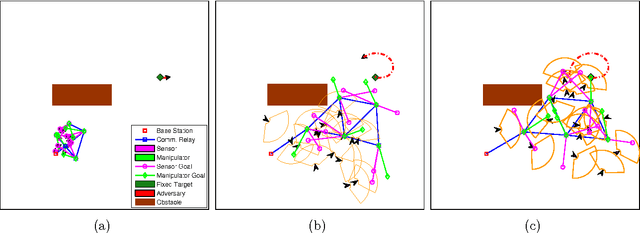
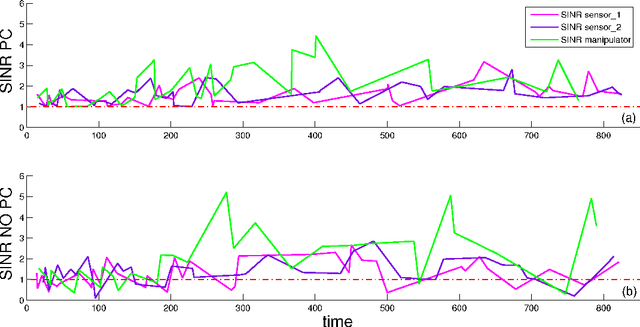
In this paper we consider the problem of coordinating robotic systems with different kinematics, sensing and vision capabilities to achieve certain mission goals. An approach that makes use of a heterogeneous team of agents has several advantages when cost, integration of capabilities, or large search areas need to be considered. A heterogeneous team allows for the robots to become "specialized", accomplish sub-goals more effectively, and thus increase the overall mission efficiency. Two main scenarios are considered in this work. In the first case study we exploit mobility to implement a power control algorithm that increases the Signal to Interference plus Noise Ratio (SINR) among certain members of the network. We create realistic sensing fields and manipulation by using the geometric properties of the sensor field-of-view and the manipulability metric, respectively. The control strategy for each agent of the heterogeneous system is governed by an artificial physics law that considers the different kinematics of the agents and the environment, in a decentralized fashion. Through simulation results we show that the network is able to stay connected at all times and covers the environment well. The second scenario studied in this paper is the biologically-inspired coordination of heterogeneous physical robotic systems. A team of ground rovers, designed to emulate desert seed-harvester ants, explore an experimental area using behaviors fine-tuned in simulation by a genetic algorithm. Our robots coordinate with a base station and collect clusters of resources scattered within the experimental space. We demonstrate experimentally that through coordination with an aerial vehicle, our ant-like ground robots are able to collect resources two times faster than without the use of heterogeneous coordination.