 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplicit Second-order LiDAR Bundle Adjustment Algorithm Using Mean Squared Group Metric
Paper and Code
Sep 03, 2024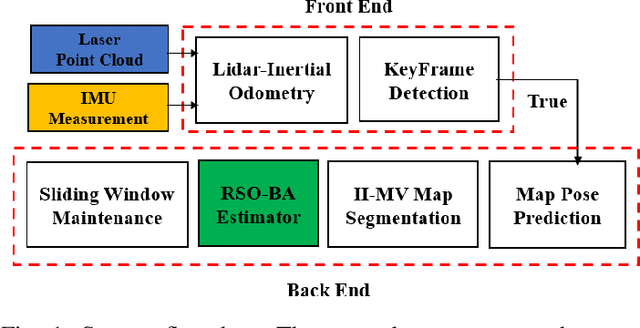
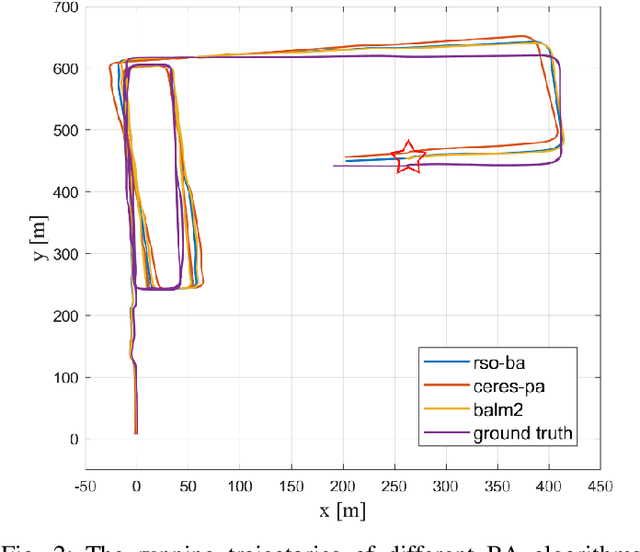
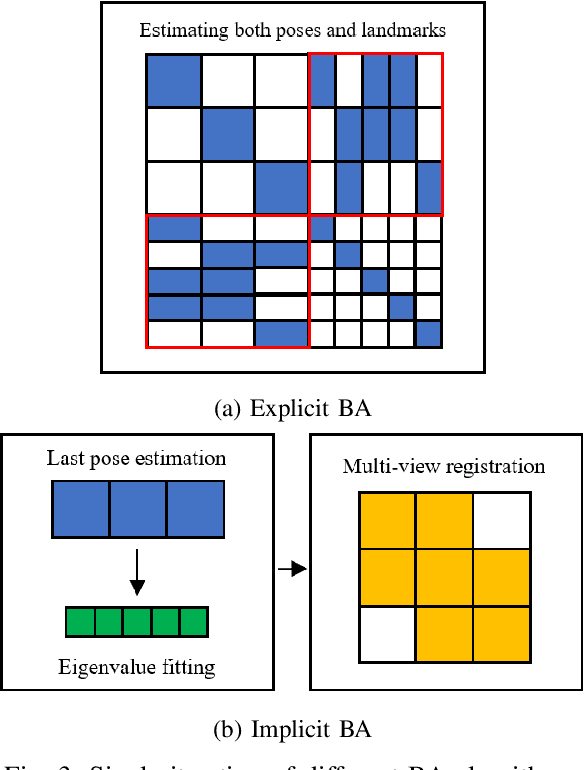
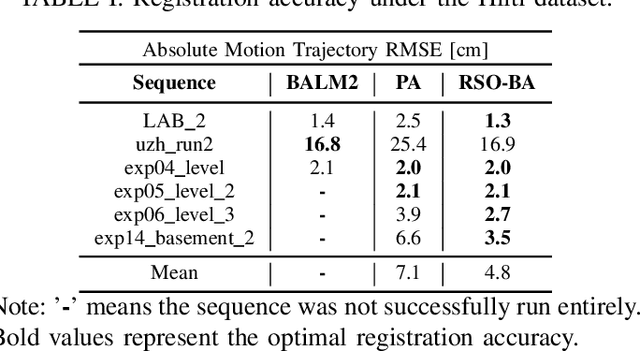
The Bundle Adjustment (BA) algorithm is a widely used nonlinear optimization technique in the backend of Simultaneous Localization and Mapping (SLAM) systems. By leveraging the co-view relationships of landmarks from multiple perspectives, it constructs a joint estimation model for both poses and landmarks, enabling the system to generate refined maps and reduce front-end localization errors. However, applying BA to LiDAR data presents unique challenges due to the large volume of 3D points typically present in point clouds, making robust and accurate model solving more complex. In this work, we propose a novel mean square group metric (MSGM). This metric applies mean square transformation to uniformly process the measurement of plane landmarks from a single perspective. The transformed metric ensures scale interpretability while avoiding the time-consuming point-by-point calculations. By integrating a robust kernel function, the metrics involved in the BA model are reweighted, enhancing the robustness of the solution process. On the basis of the proposed robust LiDAR BA model, we derived an explicit second-order estimator (RSO-BA). This estimator employs analytical formulas for Hessian and gradient calculations, ensuring the precision of the BA solution. We evaluated the proposed RSO-BA estimator against existing implicit second-order and explicit approximate second-order estimators using the publicly available datasets. The experimental results demonstrate that the RSO-BA estimator outperforms its counterparts regarding registration accuracy and robustness, particularly in large-scale or complex unstructured environments.