 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable Deterministic MDPs
Paper and Code
Jun 09, 2018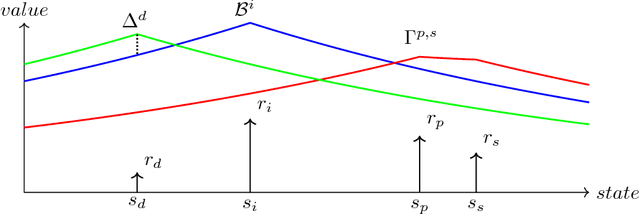
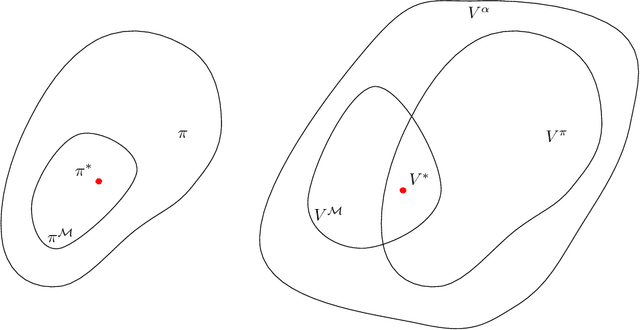

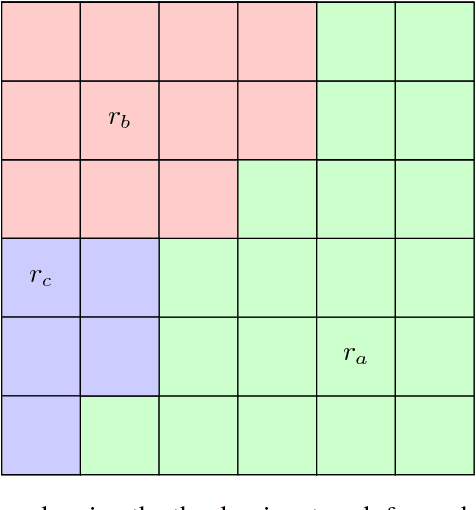
We present a method for a certain class of Markov Decision Processes (MDPs) that can relate the optimal policy back to one or more reward sources in the environment. For a given initial state, without fully computing the value function, q-value function, or the optimal policy the algorithm can determine which rewards will and will not be collected, whether a given reward will be collected only once or continuously, and which local maximum within the value function the initial state will ultimately lead to. We demonstrate that the method can be used to map the state space to identify regions that are dominated by one reward source and can fully analyze the state space to explain all actions. We provide a mathematical framework to show how all of this is possible without first computing the optimal policy or value function.