 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable Deep Reinforcement Learning for UAV Autonomous Navigation
Paper and Code
Sep 30, 2020
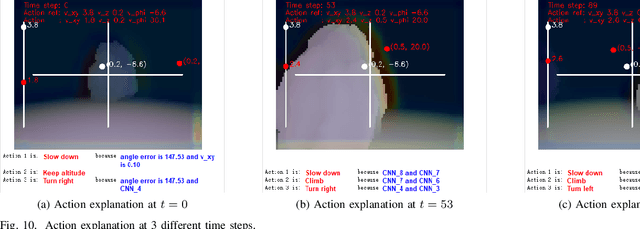


Modern deep reinforcement learning plays an important role to solve a wide range of complex decision-making tasks. However, due to the use of deep neural networks, the trained models are lacking transparency which causes distrust from their user and hard to be used in the critical field such as self-driving car and unmanned aerial vehicles. In this paper, an explainable deep reinforcement learning method is proposed to deal with the multirotor obstacle avoidance and navigation problem. Both visual and textual explanation is provided to make the trained agent more transparency and comprehensible for humans. Our model can provide real-time decision explanation for non-expert users. Also, some global explanation results are provided for experts to diagnose the learned policy. Our method is validated in the simulation environment. The simulation result shows our proposed method can get useful explanations to increase the user's trust to the network and also improve the network performance.