Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEx-DoF: Expansion of Action Degree-of-Freedom with Virtual Camera Rotation for Omnidirectional Image
Paper and Code
Nov 24, 2021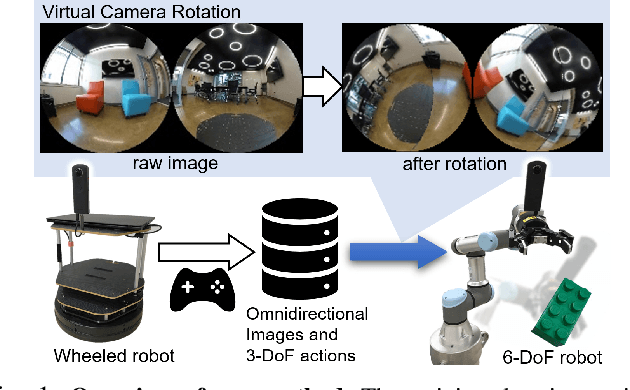
Inter-robot transfer of training data is a little explored topic in learning and vision-based robot control. Thus, we propose a transfer method from a robot with a lower Degree-of-Freedom (DoF) action to one with a higher DoF utilizing an omnidirectional camera. The virtual rotation of the robot camera enables data augmentation in this transfer learning process. In this study, a vision-based control policy for a 6-DoF robot was trained using a dataset collected by a differential wheeled ground robot with only three DoFs. Towards application of robotic manipulations, we also demonstrate a control system of a 6-DoF arm robot using multiple policies with different fields of view to enable object reaching tasks.
* 8 pages, 9 figures, 2 tables
View paper on