 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolved neuromorphic radar-based altitude controller for an autonomous open-source blimp
Paper and Code
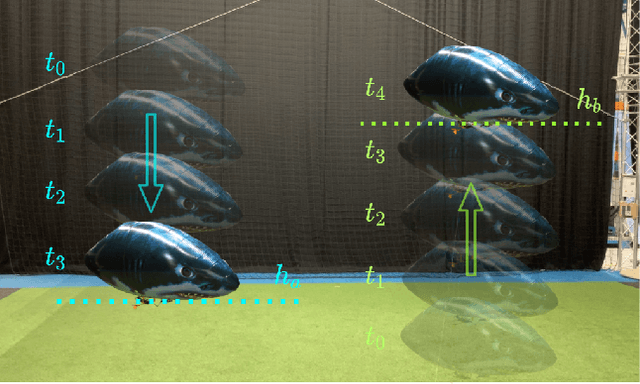

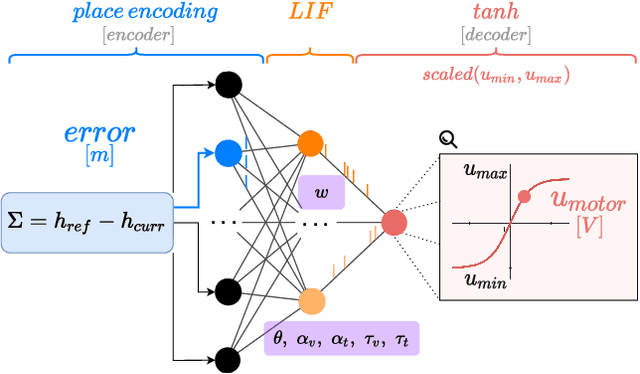
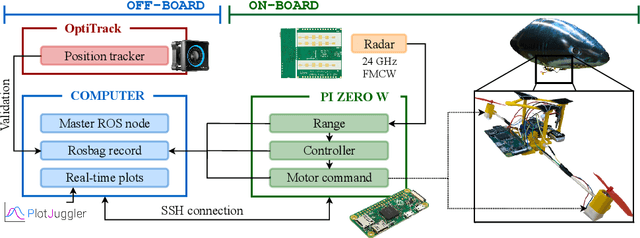
Robotic airships offer significant advantages in terms of safety, mobility, and extended flight times. However, their highly restrictive weight constraints pose a major challenge regarding the available computational power to perform the required control tasks. Spiking neural networks (SNNs) are a promising research direction for addressing this problem. By mimicking the biological process for transferring information between neurons using spikes or impulses, they allow for low power consumption and asynchronous event-driven processing. In this paper, we propose an evolved altitude controller based on a SNN for a robotic airship which relies solely on the sensory feedback provided by an airborne radar. Starting from the design of a lightweight, low-cost, open-source airship, we also present a SNN-based controller architecture, an evolutionary framework for training the network in a simulated environment, and a control scheme for ameliorating the gap with reality. The system's performance is evaluated through real-world experiments, demonstrating the advantages of our approach by comparing it with an artificial neural network and a linear controller. The results show an accurate tracking of the altitude command with an efficient control effort.