Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolutionary Co-Design of Morphology and Control of Soft Tensegrity Modular Robots with Programmable Stiffness
Paper and Code
Jan 28, 2021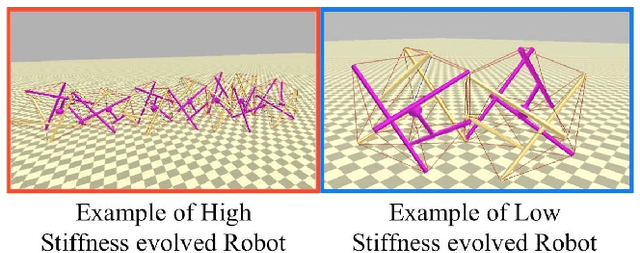
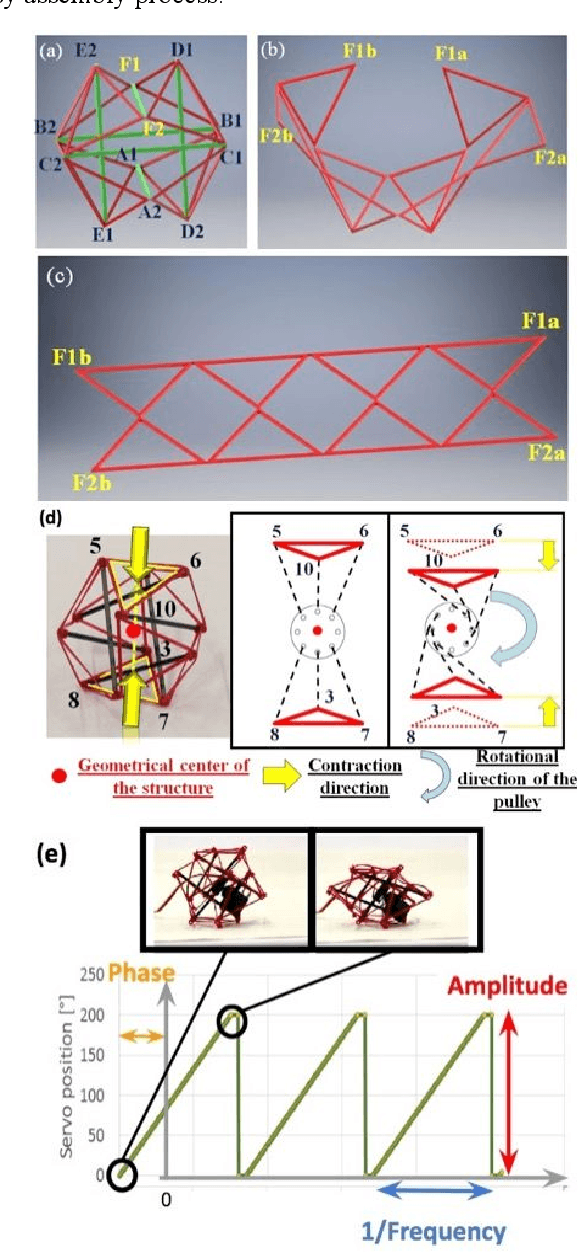
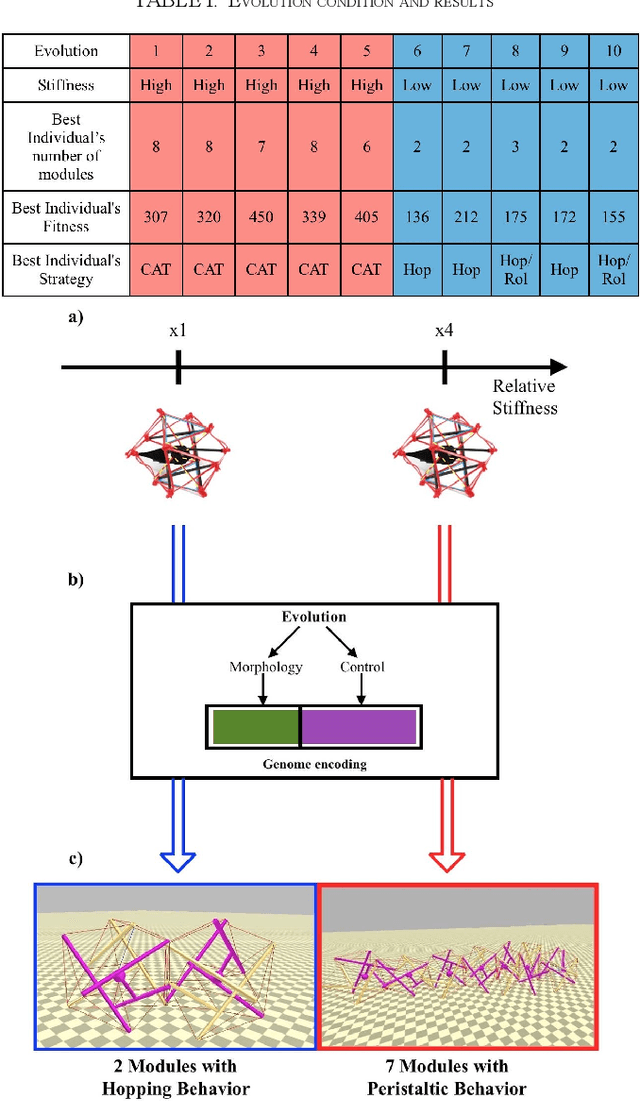
Tensegrity structures are lightweight, can undergo large deformations, and have outstanding robustness capabilities. These unique properties inspired roboticists to investigate their use. However, the morphological design, control, assembly, and actuation of tensegrity robots are still difficult tasks. Moreover, the stiffness of tensegrity robots is still an underestimated design parameter. In this article, we propose to use easy to assemble, actuated tensegrity modules and body-brain co-evolution to design soft tensegrity modular robots. Moreover, we prove the importance of tensegrity robots stiffness showing how the evolution suggests a different morphology, control, and locomotion strategy according to the modules stiffness.
* Presented in Soft Robotics Workshop at IROS 2018
View paper on