 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-Triggered Controller Synthesis for Dynamical Systems with Temporal Logic Constraints
Paper and Code
Feb 27, 2018
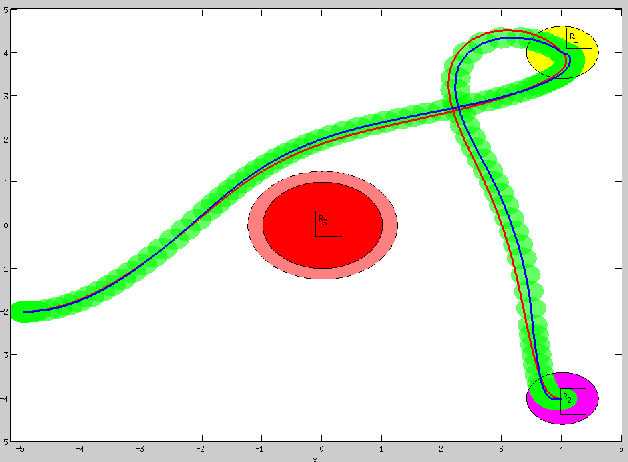

In this work, we propose an event-triggered con- trol framework for dynamical systems with temporal logical constraints. Event-triggered control methodologies have proven to be very efficient in reducing sensing, communication and computation costs. When a continuous feedback control is re- placed with an event-triggered strategy, the corresponding state trajectories also differ. In a system with logical constraints, such small deviation in the trajectory might lead to unsatisfiability of the logical constraints. In this work, we develop an approach where we ensure that the event-triggered state trajectory is confined within an tube of the ideal trajectory associated with the continuous state feedback. At the same time, we will ensure satisfiability of the logical constraints as well. Furthermore, we show that the proposed method works for delayed systems as long as the delay is bounded by a certain quantity.