 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEV-PINN: A Physics-Informed Neural Network for Predicting Electric Vehicle Dynamics
Paper and Code
Nov 22, 2024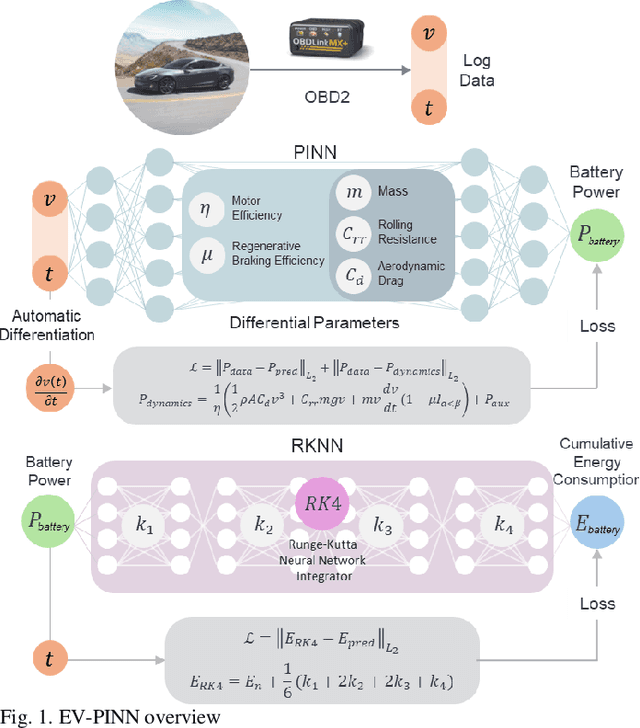



An onboard prediction of dynamic parameters (e.g. Aerodynamic drag, rolling resistance) enables accurate path planning for EVs. This paper presents EV-PINN, a Physics-Informed Neural Network approach in predicting instantaneous battery power and cumulative energy consumption during cruising while generalizing to the nonlinear dynamics of an EV. Our method learns real-world parameters such as motor efficiency, regenerative braking efficiency, vehicle mass, coefficient of aerodynamic drag, and coefficient of rolling resistance using automatic differentiation based on dynamics and ensures consistency with ground truth vehicle data. EV-PINN was validated using 15 and 35 minutes of in-situ battery log data from the Tesla Model 3 Long Range and Tesla Model S, respectively. With only vehicle speed and time as inputs, our model achieves high accuracy and generalization to dynamics, with validation losses of 0.002195 and 0.002292, respectively. This demonstrates EV-PINN's effectiveness in estimating parameters and predicting battery usage under actual driving conditions without the need for additional sensors.