 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of Driver's Gaze Region from Head Position and Orientation using Probabilistic Confidence Regions
Paper and Code
Dec 23, 2020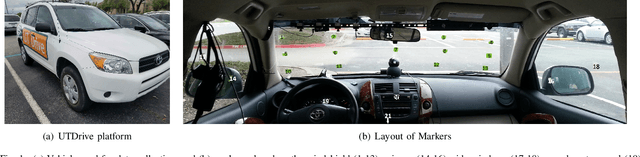
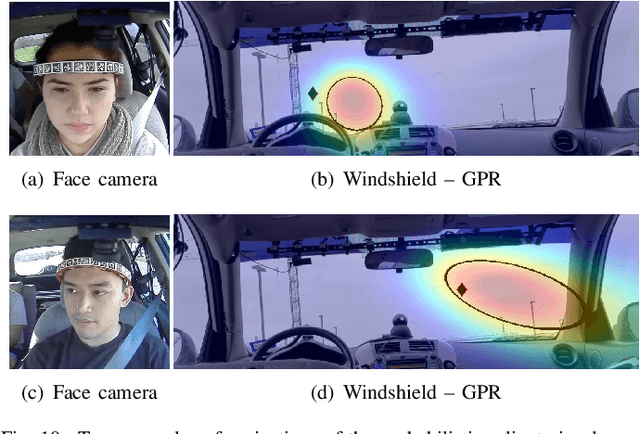


A smart vehicle should be able to understand human behavior and predict their actions to avoid hazardous situations. Specific traits in human behavior can be automatically predicted, which can help the vehicle make decisions, increasing safety. One of the most important aspects pertaining to the driving task is the driver's visual attention. Predicting the driver's visual attention can help a vehicle understand the awareness state of the driver, providing important contextual information. While estimating the exact gaze direction is difficult in the car environment, a coarse estimation of the visual attention can be obtained by tracking the position and orientation of the head. Since the relation between head pose and gaze direction is not one-to-one, this paper proposes a formulation based on probabilistic models to create salient regions describing the visual attention of the driver. The area of the predicted region is small when the model has high confidence on the prediction, which is directly learned from the data. We use Gaussian process regression (GPR) to implement the framework, comparing the performance with different regression formulations such as linear regression and neural network based methods. We evaluate these frameworks by studying the tradeoff between spatial resolution and accuracy of the probability map using naturalistic recordings collected with the UTDrive platform. We observe that the GPR method produces the best result creating accurate predictions with localized salient regions. For example, the 95% confidence region is defined by an area that covers 3.77% region of a sphere surrounding the driver.