 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of 3D Human Pose Using Prior Knowledge
Paper and Code
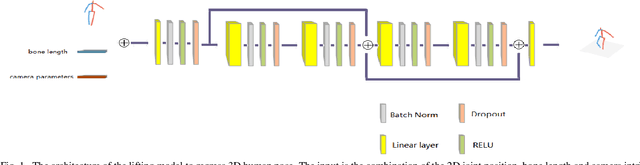
Estimating three-dimensional human poses from the positions of two-dimensional joints has shown promising results.However, using two-dimensional joint coordinates as input loses more information than image-based approaches and results in ambiguity.In order to overcome this problem, we combine bone length and camera parameters with two-dimensional joint coordinates for input.This combination is more discriminative than the two-dimensional joint coordinates in that it can improve the accuracy of the model's prediction depth and alleviate the ambiguity that comes from projecting three-dimensional coordinates into two-dimensional space. Furthermore, we introduce direction constraints which can better measure the difference between the ground truth and the output of the proposed model. The experimental results on the H36M show that the method performed better than other state-of-the-art three-dimensional human pose estimation approaches.