 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of 2D Velocity Model using Acoustic Signals and Convolutional Neural Networks
Paper and Code
Jun 10, 2019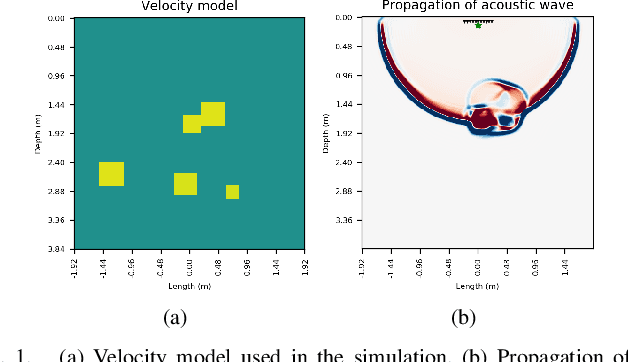
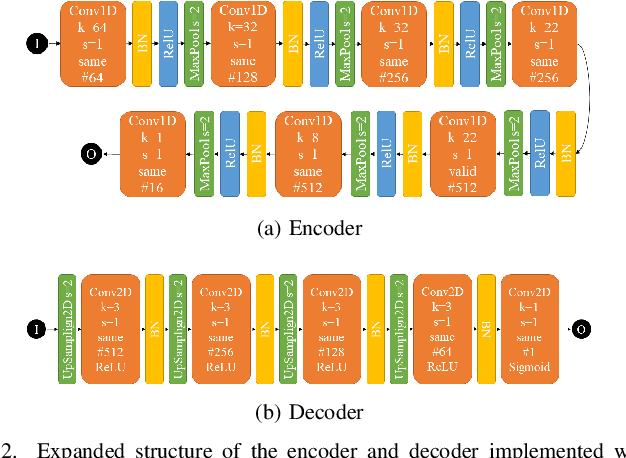


The parameters estimation of a system using indirect measurements over the same system is a problem that occurs in many fields of engineering, known as the inverse problem. It also happens in the field of underwater acoustic, especially in mediums that are not transparent enough. In those cases, shape identification of objects using only acoustic signals is a challenge because it is carried out with information of echoes that are produced by objects with different densities from that of the medium. In general, these echoes are difficult to understand since their information is usually noisy and redundant. In this paper, we propose a model of convolutional neural network with an Encoder-Decoder configuration to estimate both localization and shape of objects, which produce reflected signals. This model allows us to obtain a 2D velocity model. The model was trained with data generated by the finite-difference method, and it achieved a value of 98.58% in the intersection over union metric 75.88% in precision and 64.69% in sensibility.