Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating States and Model Uncertainties Jointly by a Sparsity Promoting UKF
Paper and Code
Jul 08, 2022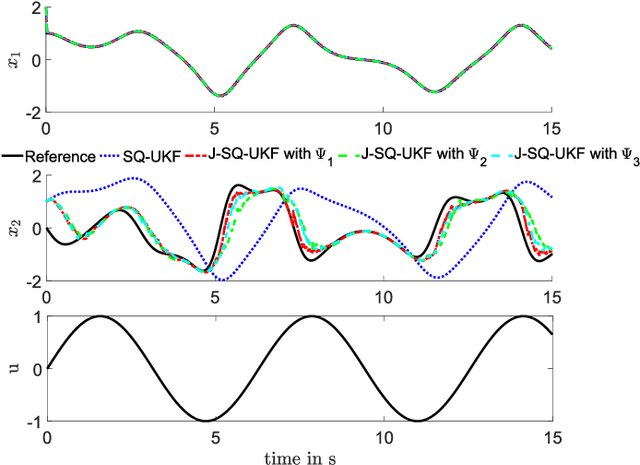
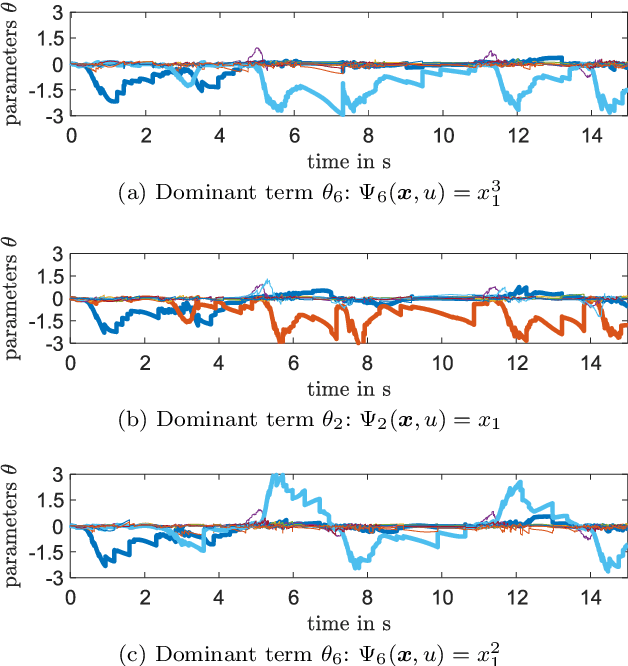
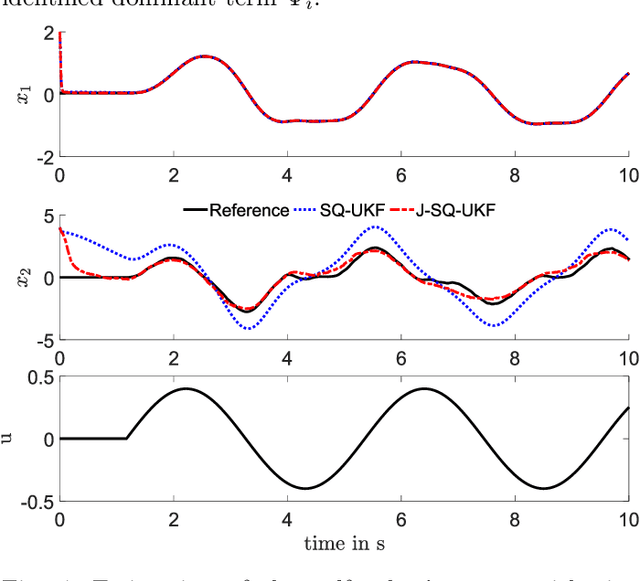
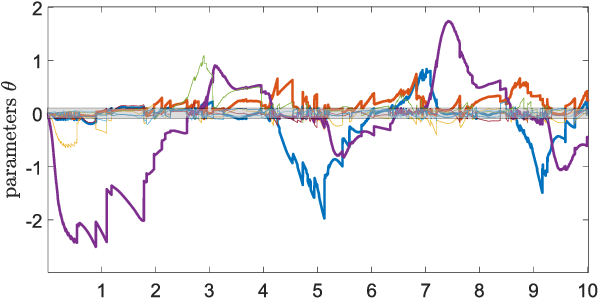
State estimation when only a partial model of a considered system is available remains a major challenge in many engineering fields. This work proposes a joint, square-root unscented Kalman filter to estimate states and model uncertainties simultaneously by linear combinations of physics-motivated library functions. Using a sparsity promoting approach, a selection of those linear combinations is chosen and thus an interpretable model can be extracted. Results indicate a small estimation error compared to a traditional square-root unscented Kalman filter and exhibit the enhancement of physically meaningful models.
* Submitted preprint
View paper on