 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeErgodic Exploration using Tensor Train: Applications in Insertion Tasks
Paper and Code
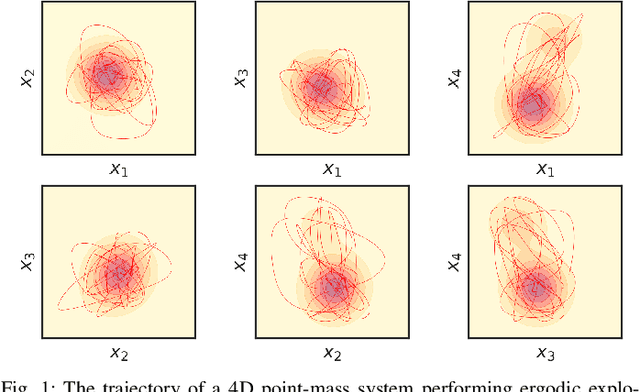

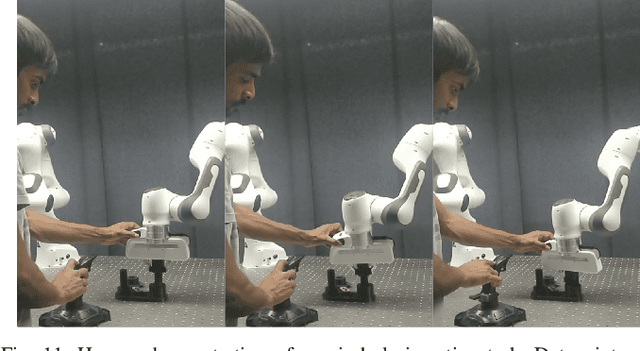
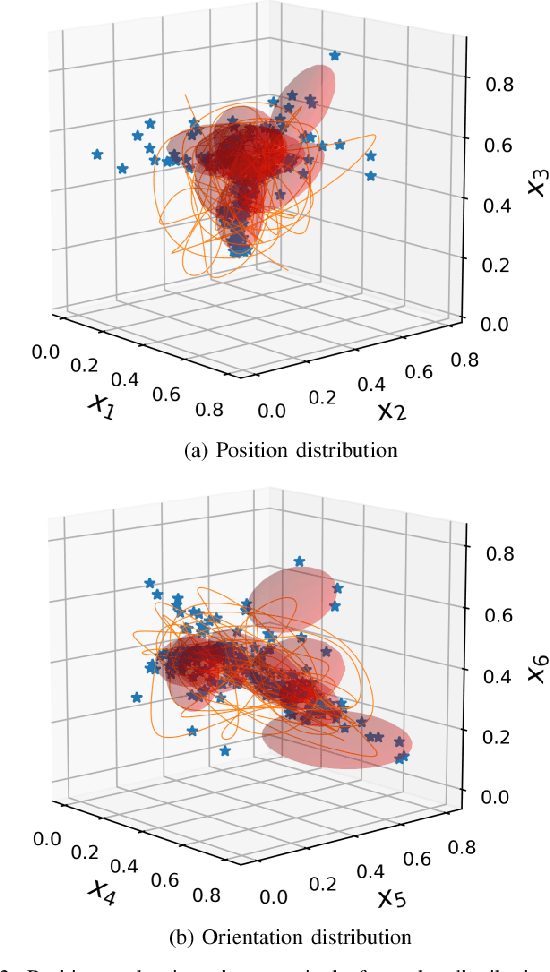
By generating control policies that create natural search behaviors in autonomous systems, ergodic control provides a principled solution to address tasks that require exploration. A large class of ergodic control algorithms relies on spectral analysis, which suffers from the curse of dimensionality, both in storage and computation. This drawback has prohibited the application of ergodic control in robot manipulation since it often requires exploration in state space with more than 2 dimensions. Indeed, the original ergodic control formulation will typically not allow exploratory behaviors to be generated for a complete 6D end-effector pose. In this paper, we propose a solution for ergodic exploration based on the spectral analysis in multidimensional spaces using low-rank tensor approximation techniques. We rely on tensor train decomposition, a recent approach from multilinear algebra for low-rank approximation and efficient computation of multidimensional arrays. The proposed solution is efficient both computationally and storage-wise, hence making it suitable for its online implementation in robotic systems. The approach is applied to a peg-in-hole insertion task using a 7-axis Franka Emika Panda robot, where ergodic exploration allows the task to be achieved without requiring the use of force/torque sensors.