 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEpisodic Future Thinking Mechanism for Multi-agent Reinforcement Learning
Paper and Code
Oct 22, 2024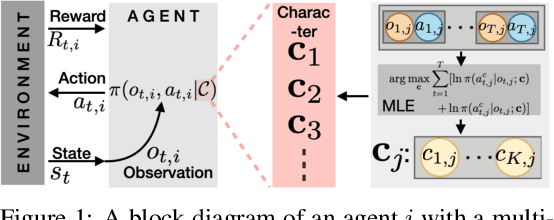
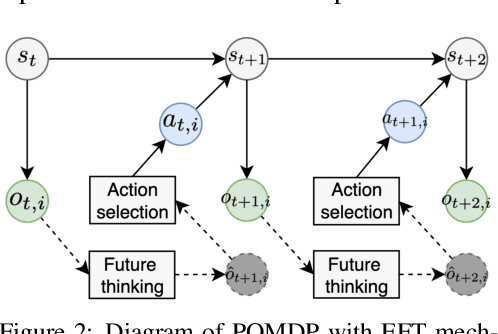
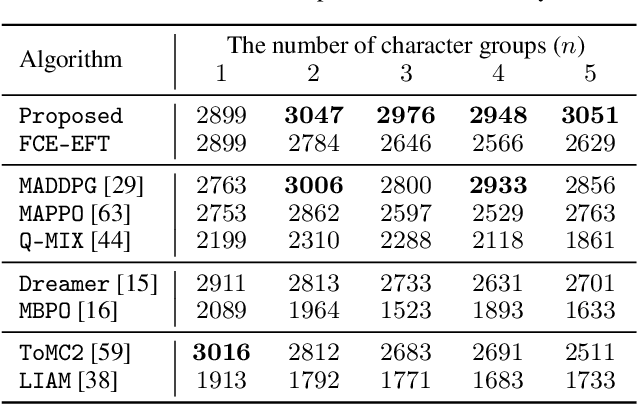
Understanding cognitive processes in multi-agent interactions is a primary goal in cognitive science. It can guide the direction of artificial intelligence (AI) research toward social decision-making in multi-agent systems, which includes uncertainty from character heterogeneity. In this paper, we introduce an episodic future thinking (EFT) mechanism for a reinforcement learning (RL) agent, inspired by cognitive processes observed in animals. To enable future thinking functionality, we first develop a multi-character policy that captures diverse characters with an ensemble of heterogeneous policies. Here, the character of an agent is defined as a different weight combination on reward components, representing distinct behavioral preferences. The future thinking agent collects observation-action trajectories of the target agents and uses the pre-trained multi-character policy to infer their characters. Once the character is inferred, the agent predicts the upcoming actions of target agents and simulates the potential future scenario. This capability allows the agent to adaptively select the optimal action, considering the predicted future scenario in multi-agent interactions. To evaluate the proposed mechanism, we consider the multi-agent autonomous driving scenario with diverse driving traits and multiple particle environments. Simulation results demonstrate that the EFT mechanism with accurate character inference leads to a higher reward than existing multi-agent solutions. We also confirm that the effect of reward improvement remains valid across societies with different levels of character diversity.