 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing the Performance of Pneu-net Actuators Using a Torsion Resistant Strain Limiting Layer
Paper and Code
Nov 04, 2023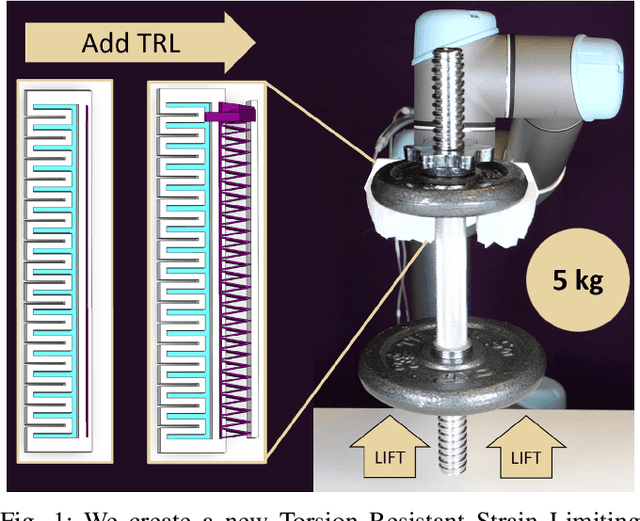
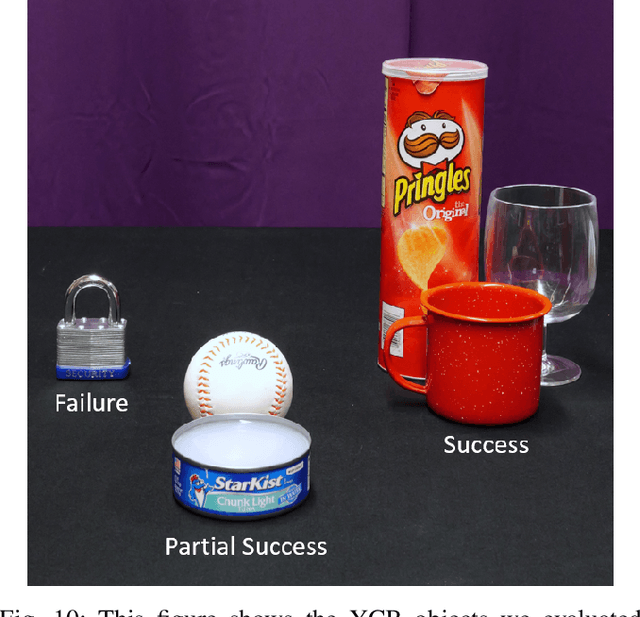
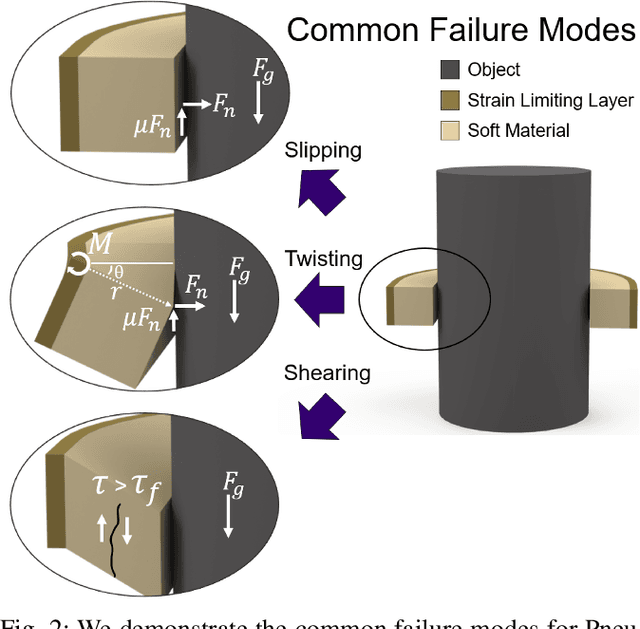
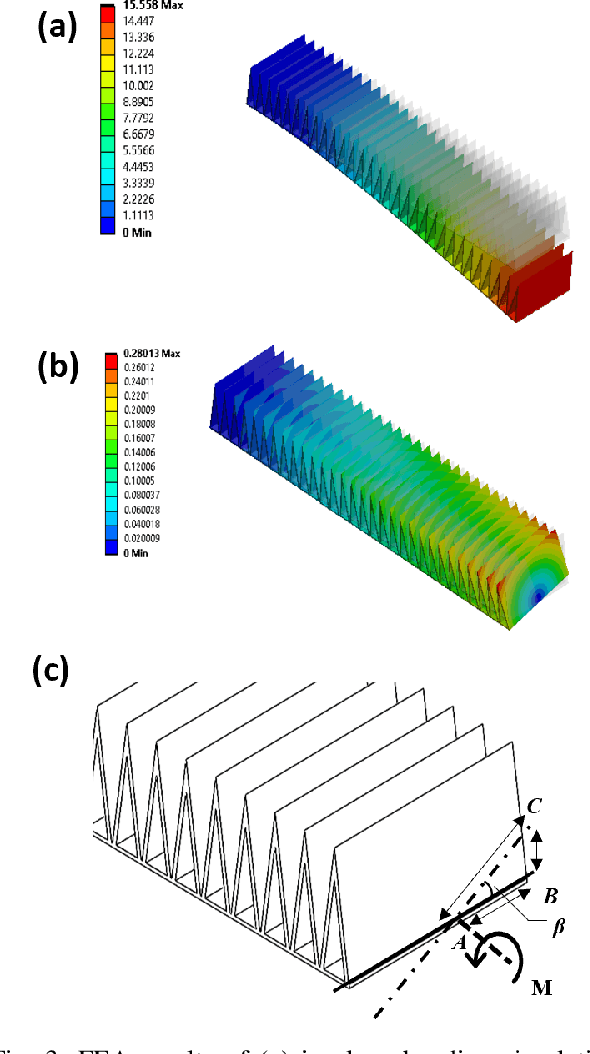
Pneunets are the primary form of soft robotic grippers. A key limitation to their wider adoption is their inability to grasp larger payloads due to objects slipping out of grasps. We have overcome this limitation by introducing a torsionally rigid strain limiting layer (TRL). This reduces out-of-plane bending while maintaining the gripper's softness and in-plane flexibility. We characterize the design space of the strain limiting layer for a Pneu-net gripper using simulation and experiment and map bending angle and relative grip strength. We found that the use of our TRL reduced out-of-plane bending by up to 97.7% in testing compared to a benchmark Pneu-net gripper from the Soft Robotics Toolkit. We demonstrate a lifting capacity of 5kg when loading using the TRL. We also see a relative improvement in peak grip force of 3N and stiffness of 1200N/m compared to 1N and 150N/m for a Pneu-net gripper without our TRL at equal pressures. Finally, we test the TRL gripper on a suite of six YCB objects above the demonstrated capability of a traditional Pneu-net gripper. We show success on all but one demonstrating significant increased capabilities.