 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing the Association in Multi-Object Tracking via Neighbor Graph
Paper and Code
Jul 01, 2020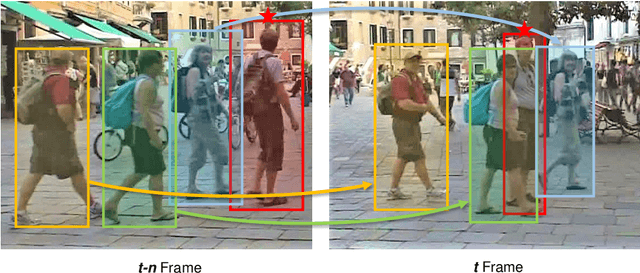
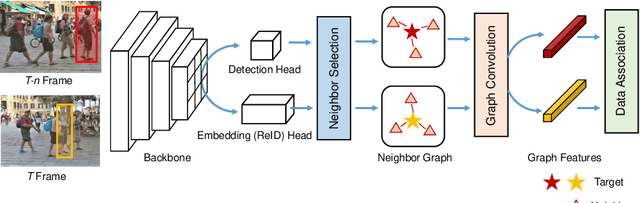

Most modern multi-object tracking (MOT) systems follow the tracking-by-detection paradigm. It first localizes the objects of interest, then extracting their individual appearance features to make data association. The individual features, however, are susceptible to the negative effects as occlusions, illumination variations and inaccurate detections, thus resulting in the mismatch in the association inference. In this work, we propose to handle this problem via making full use of the neighboring information. Our motivations derive from the observations that people tend to move in a group. As such, when an individual target's appearance is seriously changed, we can still identify it with the help of its neighbors. To this end, we first utilize the spatio-temporal relations produced by the tracking self to efficiently select suitable neighbors for the targets. Subsequently, we construct neighbor graph of the target and neighbors then employ the graph convolution networks (GCN) to learn the graph features. To the best of our knowledge, it is the first time to exploit neighbor cues via GCN in MOT. Finally, we test our approach on the MOT benchmarks and achieve state-of-the-art performance in online tracking.