 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Transfer Learning for Autonomous Driving with Systematic Accident Simulation
Paper and Code
Jul 23, 2020
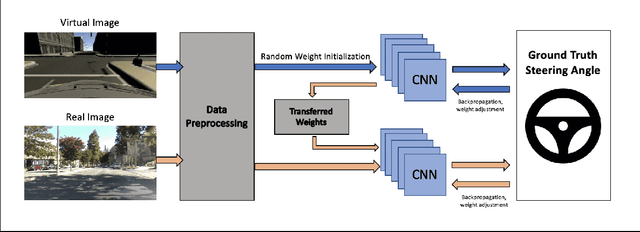

Simulation data can be utilized to extend real-world driving data in order to cover edge cases, such as vehicle accidents. The importance of handling edge cases can be observed in the high societal costs in handling car accidents, as well as potential dangers to human drivers. In order to cover a wide and diverse range of all edge cases, we systemically parameterize and simulate the most common accident scenarios. By applying this data to autonomous driving models, we show that transfer learning on simulated data sets provide better generalization and collision avoidance, as compared to random initialization methods. Our results illustrate that information from a model trained on simulated data can be inferred to a model trained on real-world data, indicating the potential influence of simulation data in real world models and advancements in handling of anomalous driving scenarios.