 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Robot Arm at the Edge with NLP and Vision Systems
Paper and Code
May 27, 2024
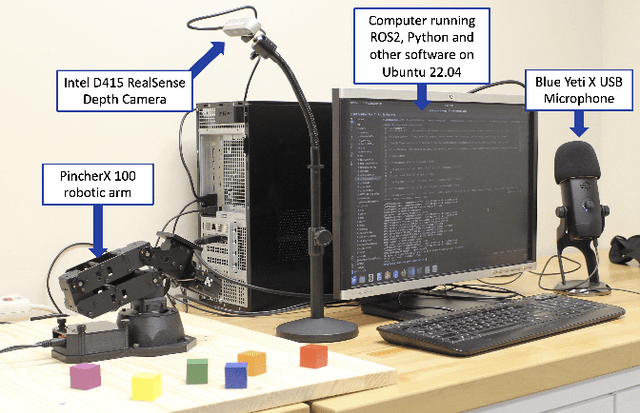

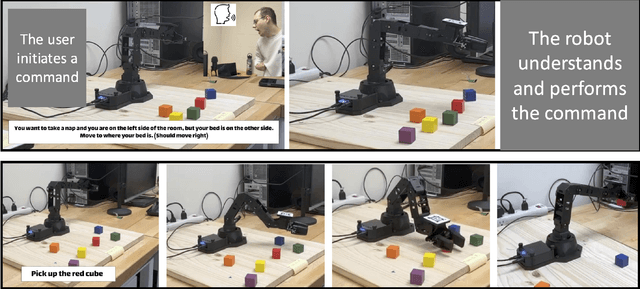
This paper introduces a "proof of concept" for a new approach to assistive robotics, integrating edge computing with Natural Language Processing (NLP) and computer vision to enhance the interaction between humans and robotic systems. Our "proof of concept" demonstrates the feasibility of using large language models (LLMs) and vision systems in tandem for interpreting and executing complex commands conveyed through natural language. This integration aims to improve the intuitiveness and accessibility of assistive robotic systems, making them more adaptable to the nuanced needs of users with disabilities. By leveraging the capabilities of edge computing, our system has the potential to minimize latency and support offline capability, enhancing the autonomy and responsiveness of assistive robots. Experimental results from our implementation on a robotic arm show promising outcomes in terms of accurate intent interpretation and object manipulation based on verbal commands. This research lays the groundwork for future developments in assistive robotics, focusing on creating highly responsive, user-centric systems that can significantly improve the quality of life for individuals with disabilities.