 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Kalman with Adaptive Appearance Motion SORT for Grounded Generic Multiple Object Tracking
Paper and Code
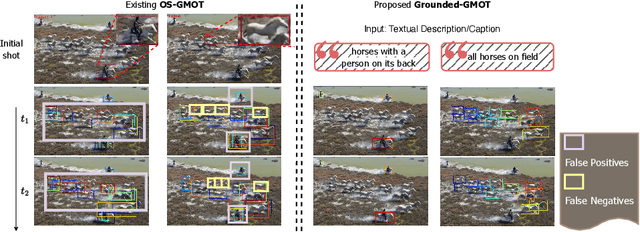
Despite recent progress, Multi-Object Tracking (MOT) continues to face significant challenges, particularly its dependence on prior knowledge and predefined categories, complicating the tracking of unfamiliar objects. Generic Multiple Object Tracking (GMOT) emerges as a promising solution, requiring less prior information. Nevertheless, existing GMOT methods, primarily designed as OneShot-GMOT, rely heavily on initial bounding boxes and often struggle with variations in viewpoint, lighting, occlusion, and scale. To overcome the limitations inherent in both MOT and GMOT when it comes to tracking objects with specific generic attributes, we introduce Grounded-GMOT, an innovative tracking paradigm that enables users to track multiple generic objects in videos through natural language descriptors. Our contributions begin with the introduction of the G2MOT dataset, which includes a collection of videos featuring a wide variety of generic objects, each accompanied by detailed textual descriptions of their attributes. Following this, we propose a novel tracking method, KAM-SORT, which not only effectively integrates visual appearance with motion cues but also enhances the Kalman filter. KAM-SORT proves particularly advantageous when dealing with objects of high visual similarity from the same generic category in GMOT scenarios. Through comprehensive experiments, we demonstrate that Grounded-GMOT outperforms existing OneShot-GMOT approaches. Additionally, our extensive comparisons between various trackers highlight KAM-SORT's efficacy in GMOT, further establishing its significance in the field. Project page: https://UARK-AICV.github.io/G2MOT. The source code and dataset will be made publicly available.