 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEngineered Self-Organization for Resilient Robot Self-Assembly with Minimal Surprise
Paper and Code
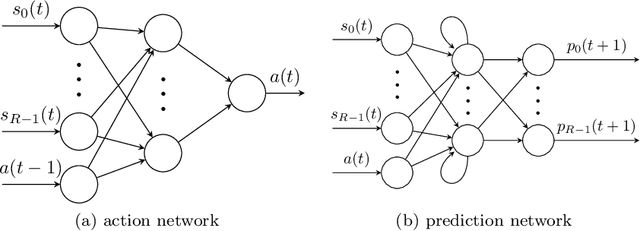
In collective robotic systems, the automatic generation of controllers for complex tasks is still a challenging problem. Open-ended evolution of complex robot behaviors can be a possible solution whereby an intrinsic driver for pattern formation and self-organization may prove to be important. We implement such a driver in collective robot systems by evolving prediction networks as world models in pair with action-selection networks. Fitness is given for good predictions which causes a bias towards easily predictable environments and behaviors in the form of emergent patterns, that is, environments of minimal surprise. There is no task-dependent bias or any other explicit predetermination for the different qualities of the emerging patterns. A careful configuration of actions, sensor models, and the environment is required to stimulate the emergence of complex behaviors. We study self-assembly to increase the scenario's complexity for our minimal surprise approach and, at the same time, limit the complexity of our simulations to a grid world to manage the feasibility of this approach. We investigate the impact of different swarm densities and the shape of the environment on the emergent patterns. Furthermore, we study how evolution can be biased towards the emergence of desired patterns. We analyze the resilience of the resulting self-assembly behaviors by causing damages to the assembled pattern and observe the self-organized self-repair process. In summary, we evolved swarm behaviors for resilient self-assembly and successfully engineered self-organization in simulation. In future work, we plan to transfer our approach to a swarm of real robots.