 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEndo-4DGS: Endoscopic Monocular Scene Reconstruction with 4D Gaussian Splatting
Paper and Code

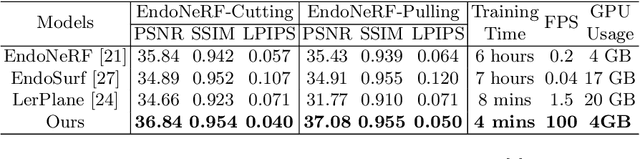
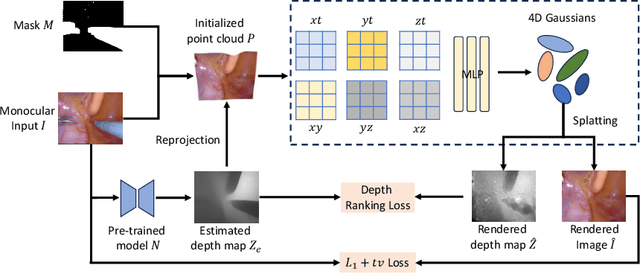
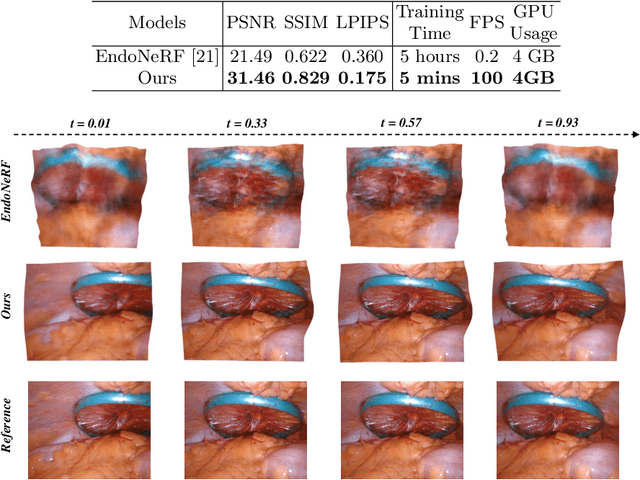
In the realm of robot-assisted minimally invasive surgery, dynamic scene reconstruction can significantly enhance downstream tasks and improve surgical outcomes. Neural Radiance Fields (NeRF)-based methods have recently risen to prominence for their exceptional ability to reconstruct scenes. Nonetheless, these methods are hampered by slow inference, prolonged training, and substantial computational demands. Additionally, some rely on stereo depth estimation, which is often infeasible due to the high costs and logistical challenges associated with stereo cameras. Moreover, the monocular reconstruction quality for deformable scenes is currently inadequate. To overcome these obstacles, we present Endo-4DGS, an innovative, real-time endoscopic dynamic reconstruction approach that utilizes 4D Gaussian Splatting (GS) and requires no ground truth depth data. This method extends 3D GS by incorporating a temporal component and leverages a lightweight MLP to capture temporal Gaussian deformations. This effectively facilitates the reconstruction of dynamic surgical scenes with variable conditions. We also integrate Depth-Anything to generate pseudo-depth maps from monocular views, enhancing the depth-guided reconstruction process. Our approach has been validated on two surgical datasets, where it can effectively render in real-time, compute efficiently, and reconstruct with remarkable accuracy. These results underline the vast potential of Endo-4DGS to improve surgical assistance.